Stop Practice
- Eighth step with solution:
- Seventh step with solution
- Sixth step with solution
- Fifth step with solution
- Fourth step with solution
- Updated
- Third step with solution
- Second step with solution
- First step with solution
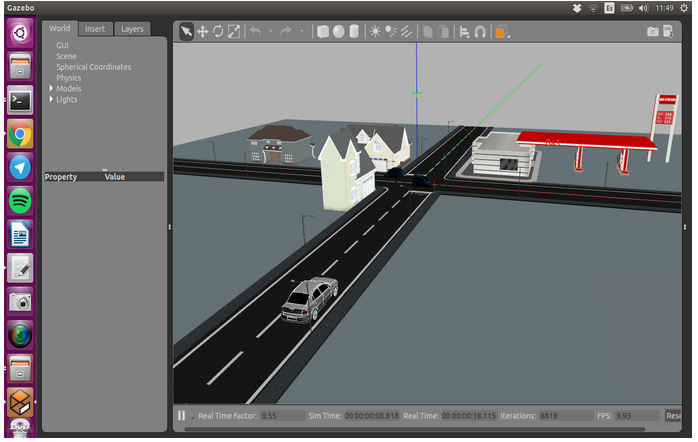
- Cars that move alone in different directions and at different speeds
I’ve modified the stop.world. Now, there are cars that move in different directions and at different speeds.
- Cars that move by themselves in the Stop world
I’ve maked a world named stop.world in Gazebo. In this world, there are cars that move by themself.
- Collisions with objects + kobukiViewer
I’ve created a world in Gazebo using a .dae file. To create this file I has used the program Sketchup in Windows.In the world I added a turtlebot to teleoperate it with kobukiViewer component.In the following video we can see how it moves the turtlebot when we teleoperate it. When I’ve created the world I’ve added a collision mesh for road.Thus the robot doesn’t fall.
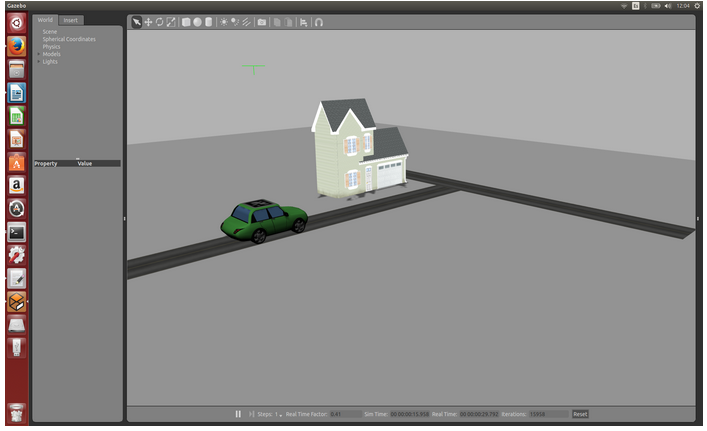
- Roads, house and carApriltag in Gazebo
I created a world called road.world in Gazebo. I have used the car created by Andres Hernández (carApriltag). I included a house and some roads. I created the roads using coordinates. First, I’ve included the carMotors.cfg file:
Motors.Endpoints=default -h localhost -p 9999
The .word file is as follows:
false model://sun model://ground_plane model://carApriltag 0 0 0.5 0 0 3.15 3 0 -20 0.02 0 0 0.02 0 20 0.02 3 -20 20 0.02 0 20 0.02 20 20 0.02 true model://house_3 -4 13 0.5 0 0 1.6