Autopark Practice
- Solution + Referee
- First solution
- Testing the python dubins 0.9.2 package
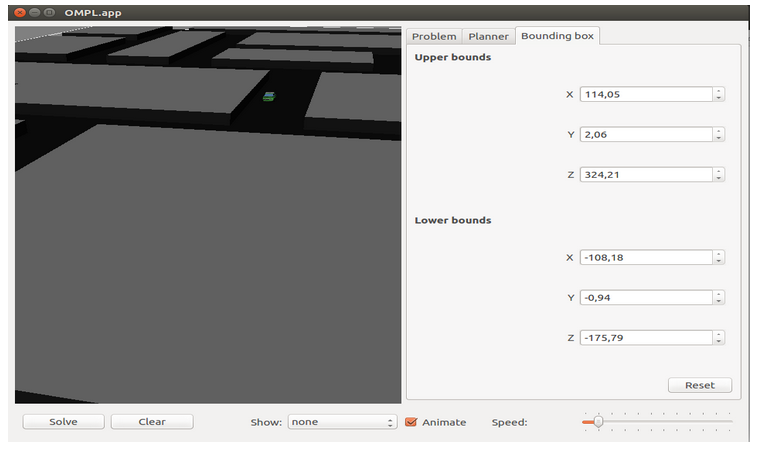
- OMPLapp thirs step
- OMPLapp second step
- European cars
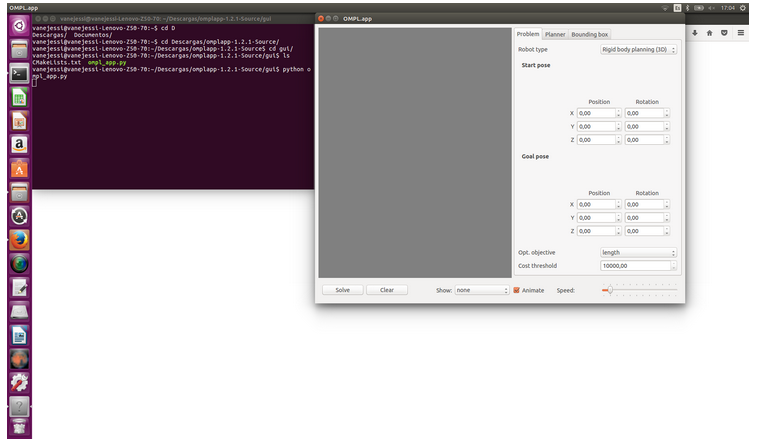
- OMPLapp first step
We’ve tested the OMPLapp.
- OMPLapp
We’ve installed the OMPLapp. OMPL is a library for non-olonomic movement planning. The installation steps are in the following link.
You may have problems installing OMPL with pip, because OMPL is for Python2 (pip2). The omplapp-1.2.1-Source/py-bindings/generate_bindings.py file have an error. The error was fixed in 1.
To launch OMPL.app, execute the ompl_app.py python script, which is found in the omplapp-1.2.1-Source/gui directory. When the GUI is loaded, a window will be presented as in the following image:
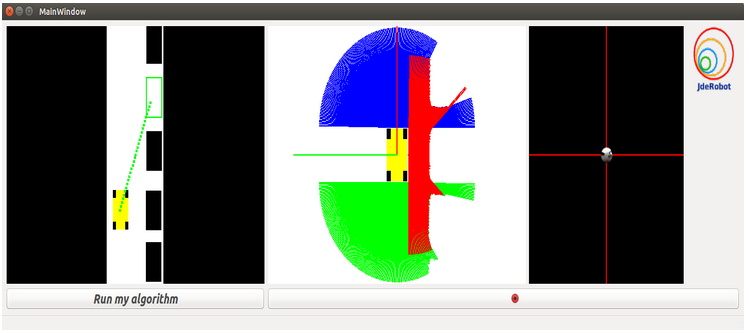
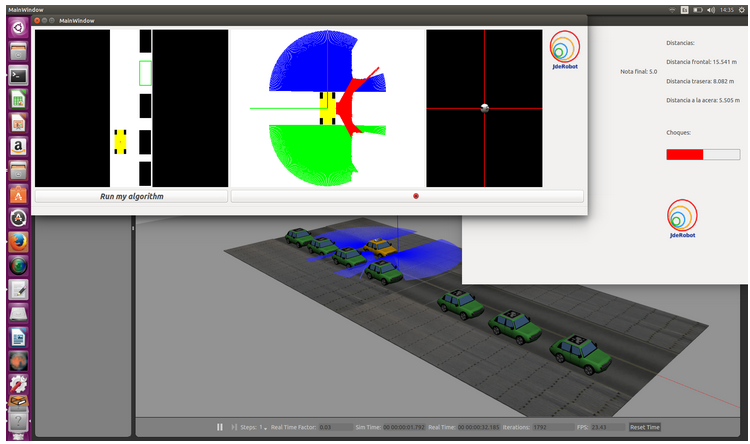
- Autopark: first step with referee
We’ve added a first version of referee in autopark’s practice. Also, we have marked the robot’s way with points.
- Autopark (car with movement)
- Autopark with teleoperate
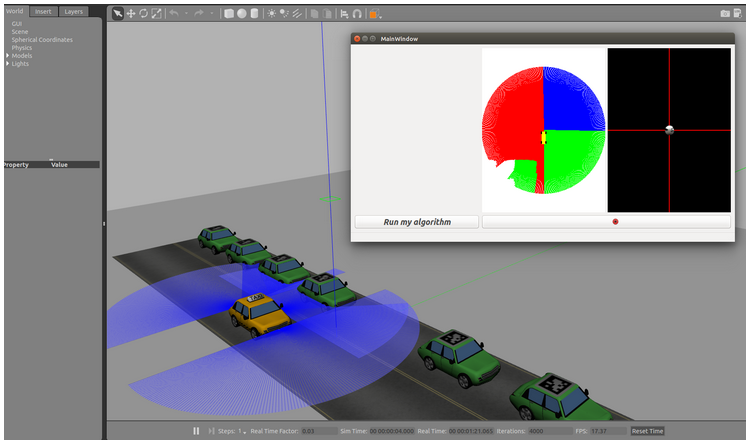
- GUI with 3 Lasers in a car (Autopark)
I’ve maked the gui of autopark’s practice. In this case, the car has a 3 lasers. Each laser have a different color in the GUI.
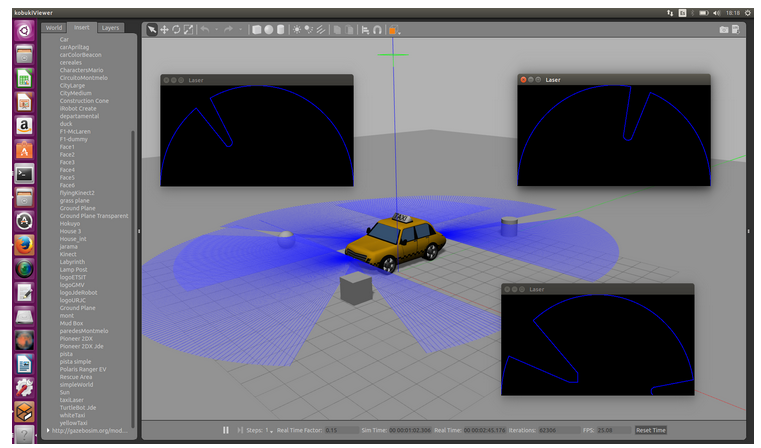
- 3 Lasers in a car + kobukiViewer
I’ve modified the laser’s plugin to have 3 lasers in the car. To test its operation we put the taxi in Gazebo, and then we run kobukiViewer. The kobukiViewer tool has been modified to test the taxlLaser’s plugin.
- yellowTaxi with 3 lasers + kobukiViewer
I’ve made a new model named taxiLaser. For this I have taken as an example the model yellowTaxi. And I’ve teleoperated this taxi with kobukiViewer: