Robotics URJC
Personal webpage for TFM Students.
View the Project on GitHub RoboticsLabURJC/2017-tfm-vanessa-fernandez
Week 25: Study of difference images, Results, Controlnet
Results table (regression, cropped image)
| Driving results (regression networks) | ||||||||||||||
| Manual | Pilotnet v + w | TinyPilotnet v + w | Stacked v+w | Stacked (diff) v+w | LSTM-Tinypilotnet v + w | DeepestLSTM-Tinypilot. | ||||||||
| Circuits | Percentage | Time | Percentage | Time | Percentage | Time | Percentage | Time | Percentage | Time | Percentage | Time | Percentage | Time |
| Simple (clockwise) | 100% | 1min 35s | 100% | 1min 37s | 100% | 1min 41s | 100% | 1min 41s | 100% | 1min 39s | 100% | 1min 40s | 100% | 1min 37s |
| Simple (anti-clockwise) | 100% | 1min 32s | 100% | 1min 38s | 100% | 1min 41s | 10% | 100% | 1min 38s | 100% | 1min 38s | 100% | 1min 38s | |
| Monaco (clockwise) | 100% | 1min 15s | 100% | 1min 20s | 100% | 1min 19s | 85% | 45% | 50% | 55% | ||||
| Monaco (anti-clockwise) | 100% | 1min 15s | 100% | 1min 19s | 100% | 1min 18s | 15% | 5% | 35% | 55% | ||||
| Nurburgrin (clockwise) | 100% | 1min 02s | 100% | 1min 04s | 100% | 1min 04s | 8% | 8% | 40% | 100% | 1min 04s | |||
| Nurburgrin (anti-clockwise) | 100% | 1min 02s | 100% | 1min 06s | 100% | 1min 05s | 80% | 50% | 50% | 80% |
Results table (regression, whole image)
| Driving results (regression networks) | ||||||||||
| Manual | Pilotnet v + w | TinyPilotnet v + w | Stacked v+w | Stacked (diff) v+w | ||||||
| Circuits | Percentage | Time | Percentage | Time | Percentage | Time | Percentage | Time | Percentage | Time |
| Simple (clockwise) | 100% | 1min 35s | 100% | 1min 41s | 100% | 1min 39s | 100% | 1min 40s | 100% | 1min 43s |
| Simple (anti-clockwise) | 100% | 1min 32s | 100% | 1min 39s | 100% | 1min 38s | 100% | 1min 46s | 10% | |
| Monaco (clockwise) | 100% | 1min 15s | 100% | 1min 21s | 100% | 1min 19s | 50% | 5% | ||
| Monaco (anti-clockwise) | 100% | 1min 15s | 100% | 1min 23s | 100% | 1min 20s | 7% | 5% | ||
| Nurburgrin (clockwise) | 100% | 1min 02s | 100% | 1min 03s | 100% | 1min 05s | 50% | 8% | ||
| Nurburgrin (anti-clockwise) | 100% | 1min 02s | 100% | 1min 06s | 100% | 1min 06s | 80% | 50% |
| Driving results (regression networks, continuation) | ||||||
| LSTM-Tinypilotnet v + w | DeepestLSTM-Tinypilot. | Controlnet | ||||
| Circuits | Percentage | Time | Percentage | Time | Percentage | Time |
| Simple (clockwise) | 100% | 1min 39s | 100% | 1min 39s | 100% | 1min 46s |
| Simple (anti-clockwise) | 10% | 100% | 1min 41s | 100% | 1min 37s | |
| Monaco (clockwise) | 100% | 1min 27s | 50% | 5% | ||
| Monaco (anti-clockwise) | 50% | 100% | 1min 21s | 5% | ||
| Nurburgrin (clockwise) | 100% | 1min 08s | 100% | 1min 05s | 8% | |
| Nurburgrin (anti-clockwise) | 50% | 100% | 1min 07s | 8% |
Study of temporal images
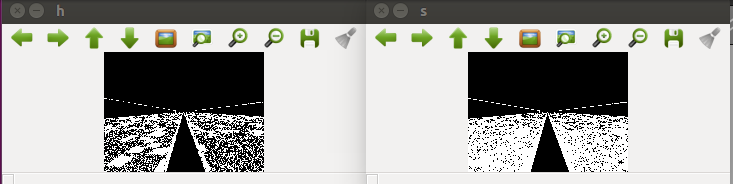
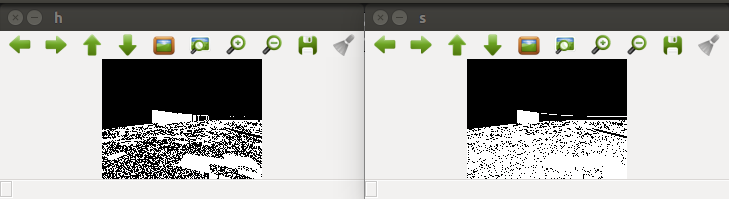
I’ve tried to create a difference image with only two channels: HV. First, I made the absolute difference of the two images (separated 5 frames) for each channel. Then I normalized the difference between 0 and 255. It isn’t a good solution for driving.
Straight line:
Curve:
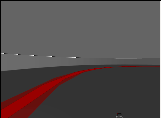
I’ve create a sum image using numpy.add(x1, x2). The image result is:
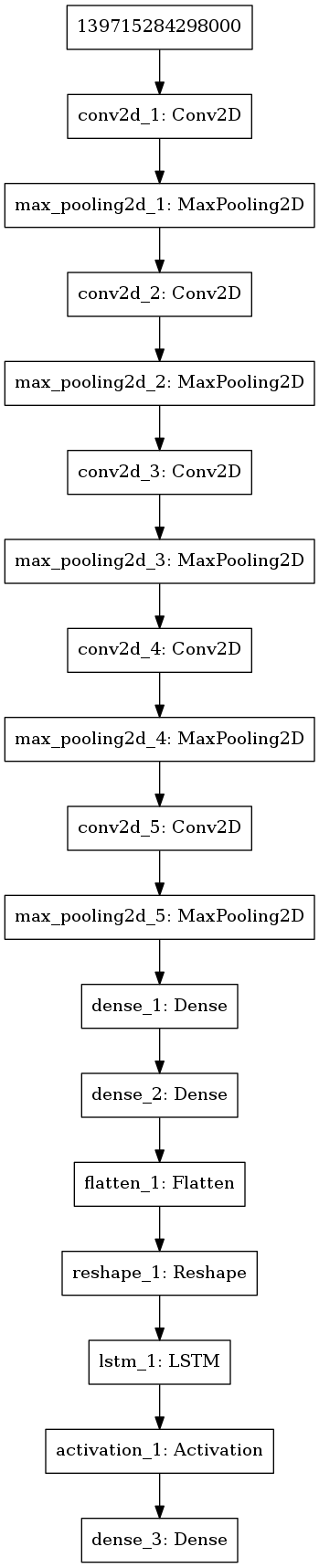
Controlnet
| Driving results (Controlnet network, whole image) | ||||
| Manual | Controlnet | |||
| Circuits | Percentage | Time | Percentage | Time |
| Simple (clockwise) | 100% | 1min 35s | 100% | 1min 46s |
| Simple (anti-clockwise) | 100% | 1min 33s | 100% | 1min 37s |
| Monaco (clockwise) | 100% | 1min 15s | 5% | |
| Monaco (anti-clockwise) | 100% | 1min 15s | 5% | |
| Nurburgrin (clockwise) | 100% | 1min 02s | 8% | |
| Nurburgrin (anti-clockwise) | 100% | 1min 02s | 8% |