Robotics URJC
Personal webpage for TFM Students.
View the Project on GitHub RoboticsLabURJC/2017-tfm-vanessa-fernandez
Week 26: Tests with other circuit, Controlnet, Temporal difference network
Tests with other circuit
I’ve done tests with a circuit that hasn’t been used for training.
Results table (cropped image)
| Driving results (regression networks) | ||||||||||||||
| Manual | Pilotnet v + w | TinyPilotnet v + w | Stacked v+w | Stacked (diff) v+w | LSTM-Tinypilotnet v + w | DeepestLSTM-Tinypilot. | ||||||||
| Circuits | Percentage | Time | Percentage | Time | Percentage | Time | Percentage | Time | Percentage | Time | Percentage | Time | Percentage | Time |
| Small (clockwise) | 100% | 1min 00s | 10% | 100% | 1min 14s | 100% | 1min 08s | 10% | 10% | 100% | 1min 09s | |||
| Small (anti-clockwise) | 100% | 59s | 20% | 100% | 1min 17s | 100% | 1min 08s | 20% | 80% | 100% | 1min 07s |
| Driving results (classification networks) | ||||||||
| Manual | 5v+7w biased | 5v+7w balanced | 5v+7w imbalanced | |||||
| Circuits | Percentage | Time | Percentage | Time | Percentage | Time | Percentage | Time |
| Small (clockwise) | 100% | 1min 00s | 100% | 1min 02s | 100% | 1min 03s | 100% | 1min 07s |
| Small (anti-clockwise) | 100% | 59s | 100% | 1min 05s | 100% | 1min 02s | 100% | 1min 08s |
Results table (whole image)
| Driving results (regression networks) | ||||||||||
| Manual | Pilotnet v + w | TinyPilotnet v + w | Stacked v+w | Stacked (diff) v+w | ||||||
| Circuits | Percentage | Time | Percentage | Time | Percentage | Time | Percentage | Time | Percentage | Time |
| Small (clockwise) | 100% | 1min 00s | 85% | 100% | 1min 09s | 80% | 100% | 1min 03s | ||
| Small (anti-clockwise) | 100% | 59s | 100% | 1min 08s | 100% | 1min 13s | 20% | 100% | 1min 04s |
| Driving results (regression networks, continuation) | ||||||
| LSTM-Tinypilotnet v + w | DeepestLSTM-Tinypilot. | Controlnet | ||||
| Circuits | Percentage | Time | Percentage | Time | Percentage | Time |
| Small (clockwise) | 10% | 100% | 1min 01s | 20% | ||
| Small (anti-clockwise) | 20% | 20% | 20% |
| Driving results (classification networks) | ||||||||
| Manual | 5v+7w biased | 5v+7w balanced | 5v+7w imbalanced | |||||
| Circuits | Percentage | Time | Percentage | Time | Percentage | Time | Percentage | Time |
| Small (clockwise) | 100% | 1min 00s | 100% | 1min 10s | 80% | 100% | 1min 07s | |
| Small (anti-clockwise) | 100% | 59s | 100% | 1min 07s | 15% | 75% |
Controlnet
| Driving results (Controlnet network, whole image) | ||||
| Manual | Controlnet | |||
| Circuits | Percentage | Time | Percentage | Time |
| Simple (clockwise) | 100% | 1min 35s | 100% | 1min 46s |
| Simple (anti-clockwise) | 100% | 1min 33s | 100% | 1min 38s |
| Monaco (clockwise) | 100% | 1min 15s | 5% | |
| Monaco (anti-clockwise) | 100% | 1min 15s | 5% | |
| Nurburgrin (clockwise) | 100% | 1min 02s | 8% | |
| Nurburgrin (anti-clockwise) | 100% | 1min 02s | 75% |
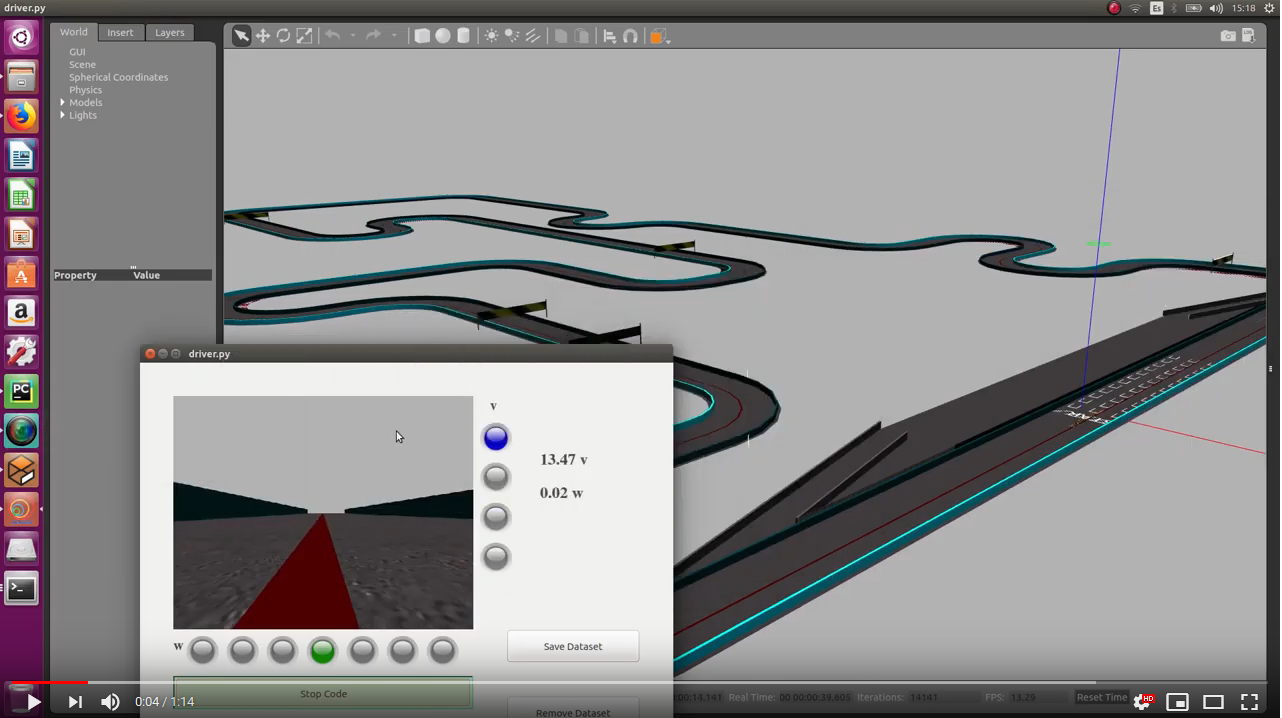
Temporal difference network
I’ve tested a network that takes a gray scale difference image as the input image, but I’ve made a preprocess:
margin = 10 i1 = cv2.cvtColor(imgs[i], cv2.COLOR_BGR2GRAY) i2 = cv2.cvtColor(imgs[i - (margin + 1)], cv2.COLOR_BGR2GRAY) i1 = cv2.GaussianBlur(i1, (5, 5), 0) i2 = cv2.GaussianBlur(i2, (5, 5), 0) difference = np.zeros((i1.shape[0], i1.shape[1], 1)) difference[:, :, 0] = cv2.absdiff(i1, i2) _, difference[:, :, 0] = cv2.threshold(difference[:, :, 0], 15, 255, cv2.THRESH_BINARY) kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (3, 3)) difference[:, :, 0] = cv2.morphologyEx(difference[:, :, 0], cv2.MORPH_CLOSE, kernel)
I’ve used a margin of 10 images between the 2 images. The result is:

| Driving results (Temporal difference network, whole image) | ||||
| Manual | Controlnet | |||
| Circuits | Percentage | Time | Percentage | Time |
| Simple (clockwise) | 100% | 1min 35s | 25% | |
| Simple (anti-clockwise) | 100% | 1min 33s | 10% | |
| Monaco (clockwise) | 100% | 1min 15s | 5% | |
| Monaco (anti-clockwise) | 100% | 1min 15s | 3% | |
| Nurburgrin (clockwise) | 100% | 1min 02s | 8% | |
| Nurburgrin (anti-clockwise) | 100% | 1min 02s | 3% |