Montmeló vs simple circuit no red line comparison fot all the brains
In this case, the comparison is between the 5 different brain approaches that we have used during the past few months.
The different brains are:
- PID controller
- NO MEMORY Pilotnet brain (CNN based)
- IMPLICIT MEMORY Deepest LSTM Tinypilonet (CNN+LSTM with 1 image as input for each timestep)
- EXPLICIT MEMORY Pilotnet with 3DCNN (3 images as input for each timestep with 3DCNN)
- EXPLICIT MEMORY Deepest LSTM Tinypilotnet with 3 image-input (3 images as input for each timestep)
We compare these brain on 2 different circuits that should be enough to show differences: Montmeló with red line and the simple circuit without the red line. The first one is the circuit with difficult turns and the second one has a special feature, we have removed the red line from it. Since the dataset we have used for training has the red line, it’s interesting to show if the brains generalise to worlds without the red line.
We expect the brains with memory to be better on some aspects to the rest of the brains.
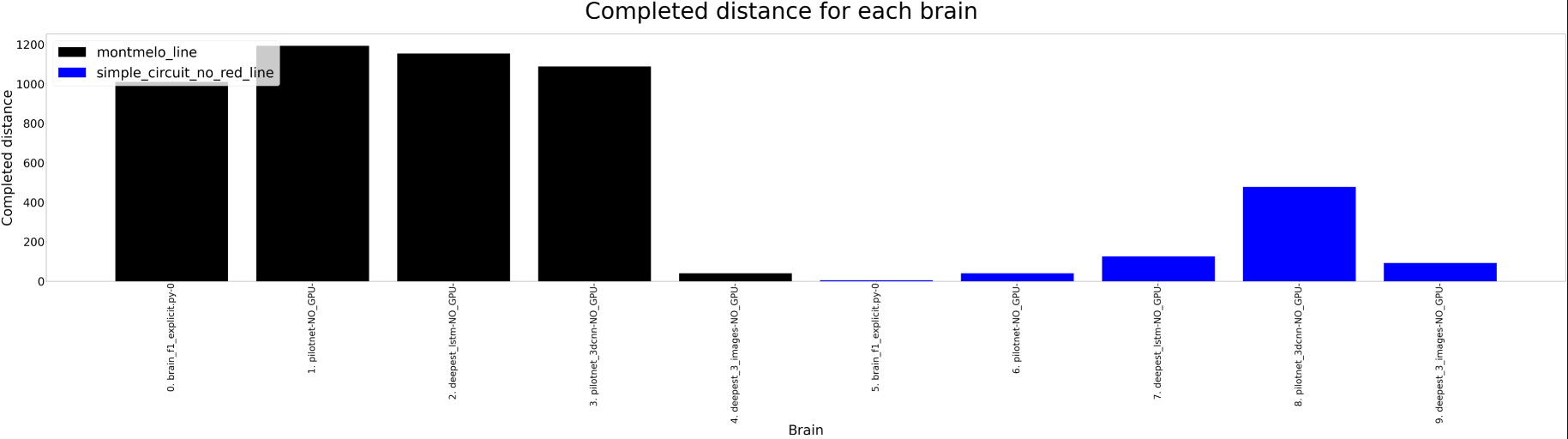
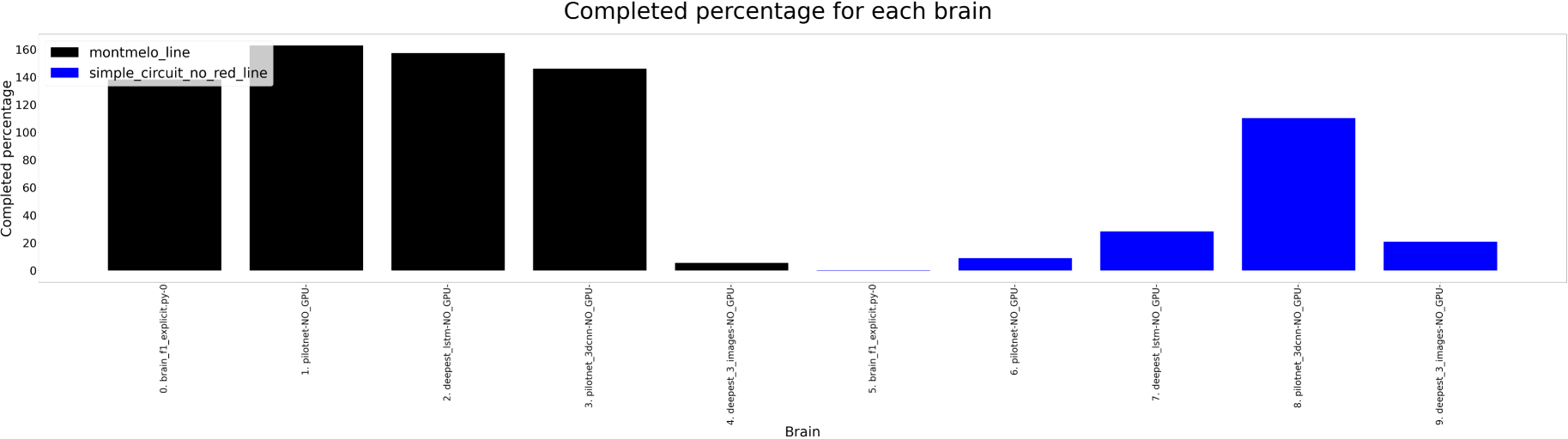
The results show that all the brains are capable of finishing Montmeló except for the Deepest LSTM Tinypilotnet with 3 image-input. This should be related with a problem on the architecture of the brain or its capabilities.
Considering the second circuit, we start to see the differences. The first brain is not able to even start driving, since it expects a red line that is missing. This is actually the worse brain, since it’s only capable of running on a very specific scenario.
The second and third brains are not able to complete the circuit, but the third one is still able to complete some part of the circuit. This could be related to the memory capabilities that Pilotnet misses.
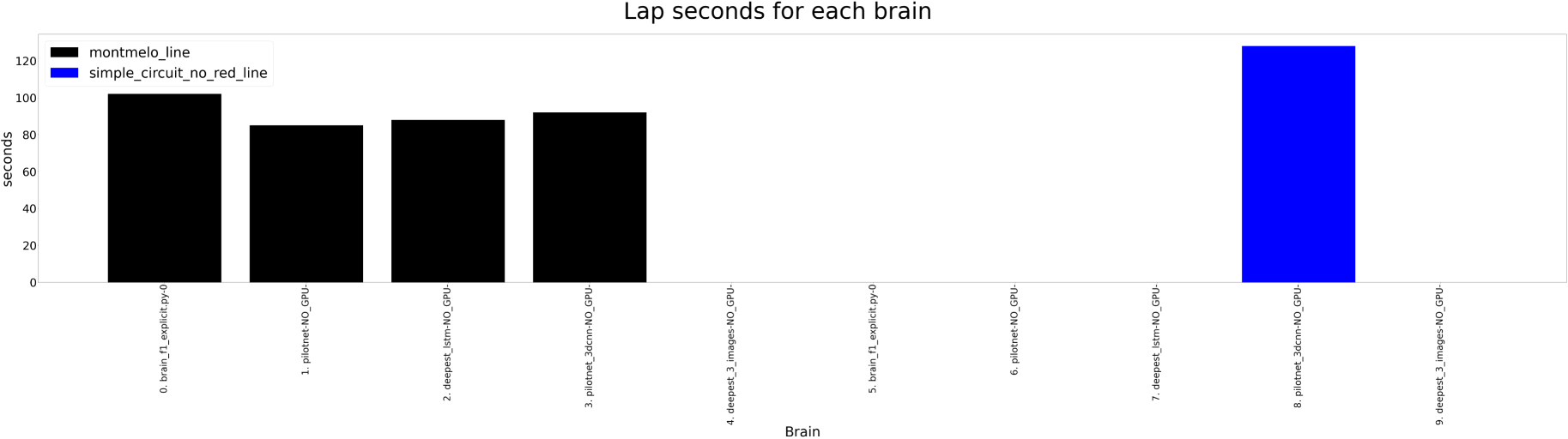
Pilotnet with 3dCNN is able to complete the simple circuit even without the red line that was not on the dataset. It receives 3 images as input. The seconds per lap are a bit higher but that’s completely normal.
The fourth brain again shows a great struggle on this circuit and fails miserably.
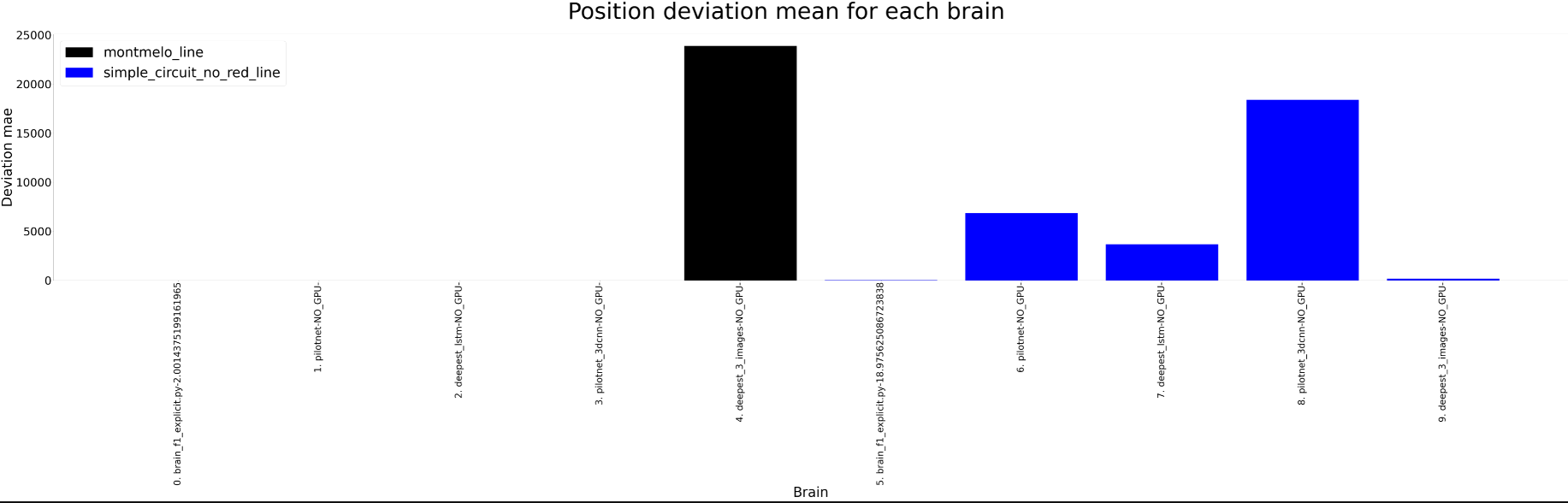
Detail of position deviation
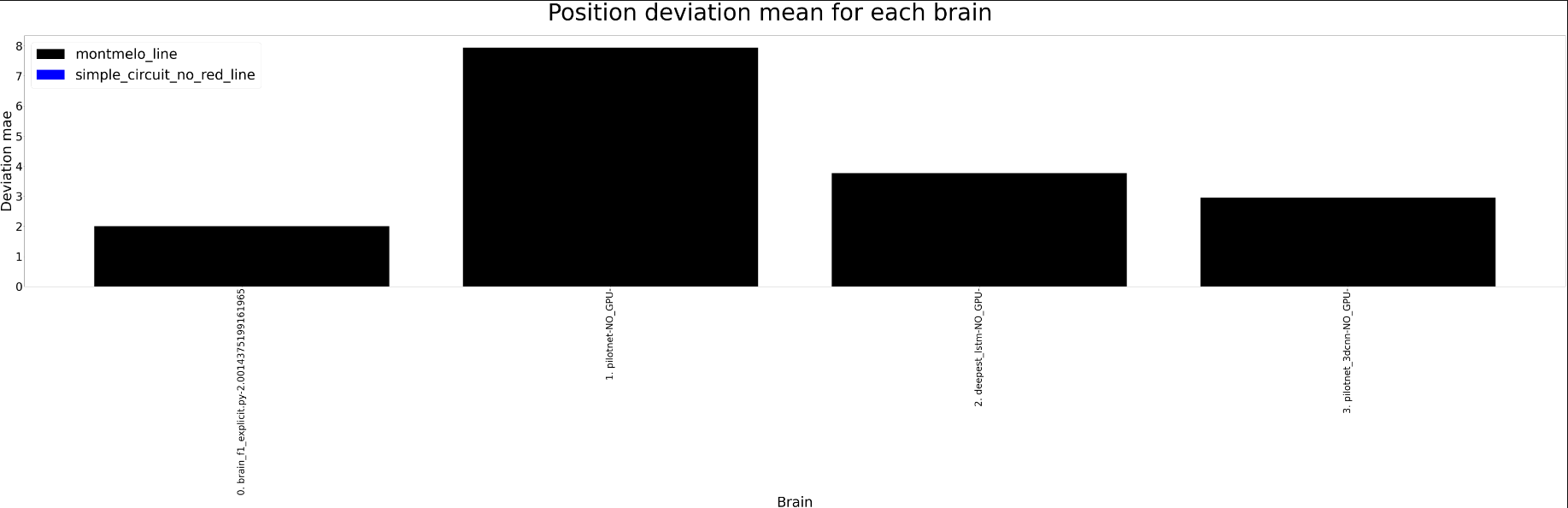
Taking a closer look to the position deviation values we can get a better insight of what’s going on in the comparison. In the first image below, we can see the position deviation values for the brains that complete the Montmeló circuit. The PID controller (explicit brain) hast the best value for this metric. For the neural network based brains, we can see a deceasing trend while we go from the simplest brain to the most advanced one. the Pilotnet with 3DCNNs.
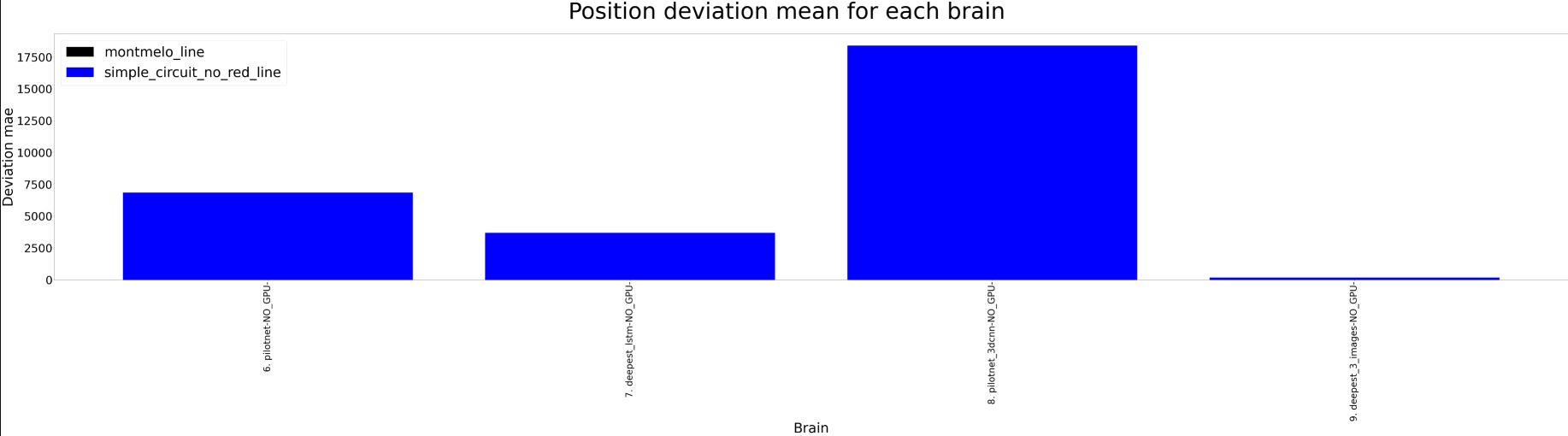
On the second image, we can see the mean position deviation value for the simple circuit without the red line. The values are really high, which means that the car is not “following the line” corretly and the path that it follows is really different. Still, the Pilotnet 3DCNN brain is able to complete the circuit. This could be related to the addition of memory to the equation.
Conclusion
With this post, we start to understand the differences of using a neural network based approach against a PID controller and a brain without memory against one that actually has some kind of memory.