Exploring data augmentation for LSTMs
New experiments this week.
Experiments:
- Results for different data augmentation strategies
- Results for different data augmentation strategies only in Montmeló
- Results for LeNet classification
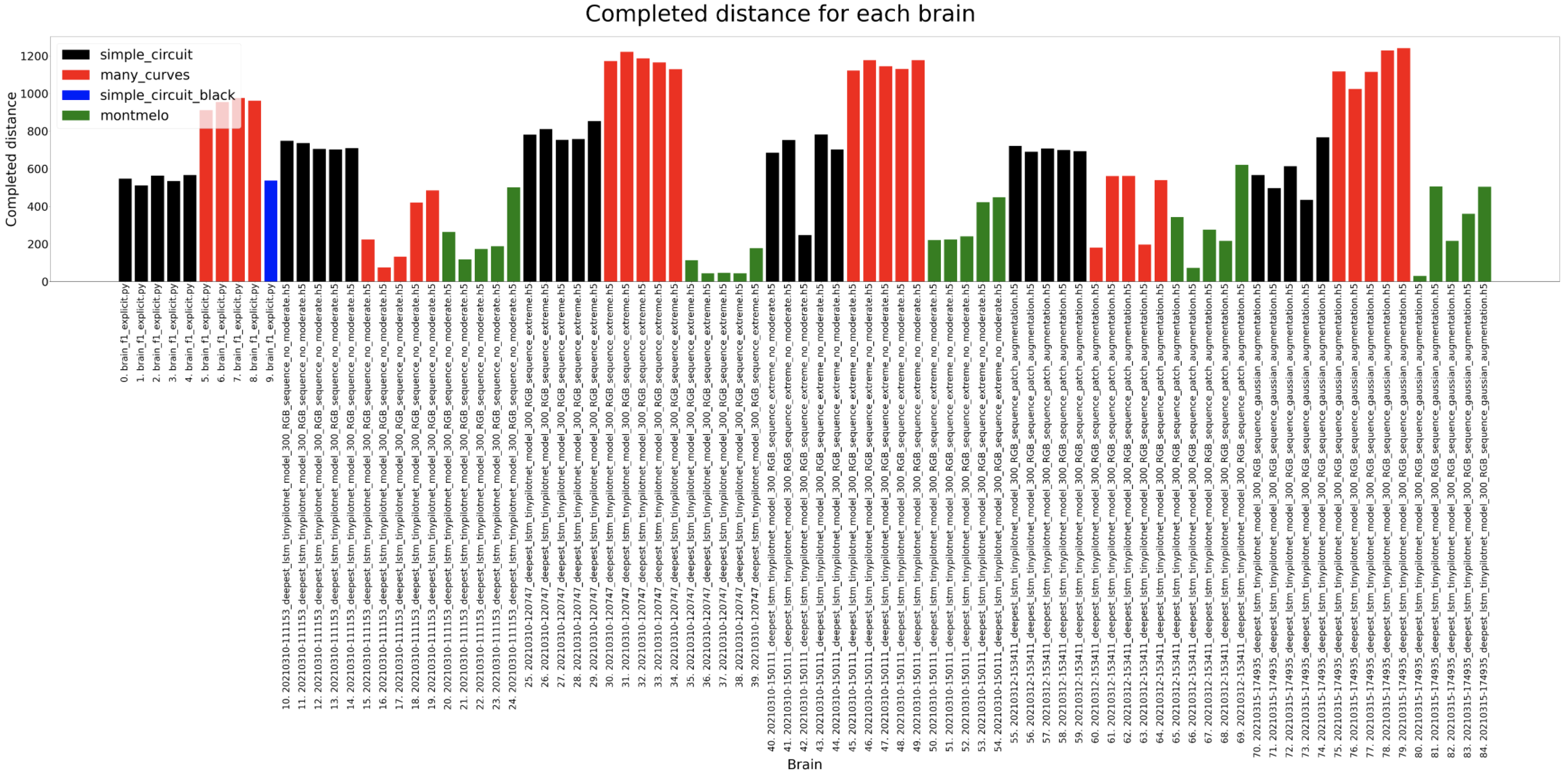
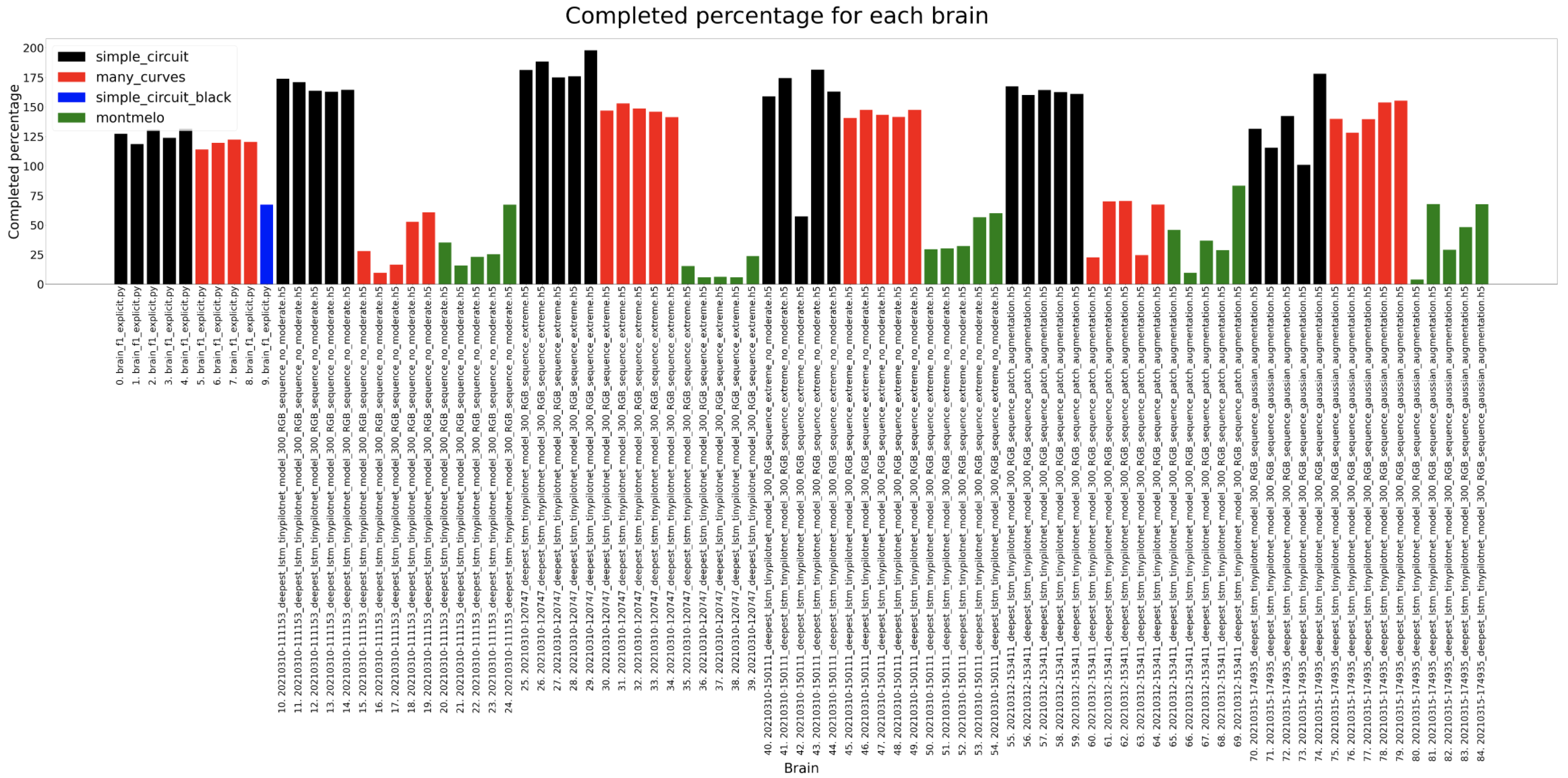
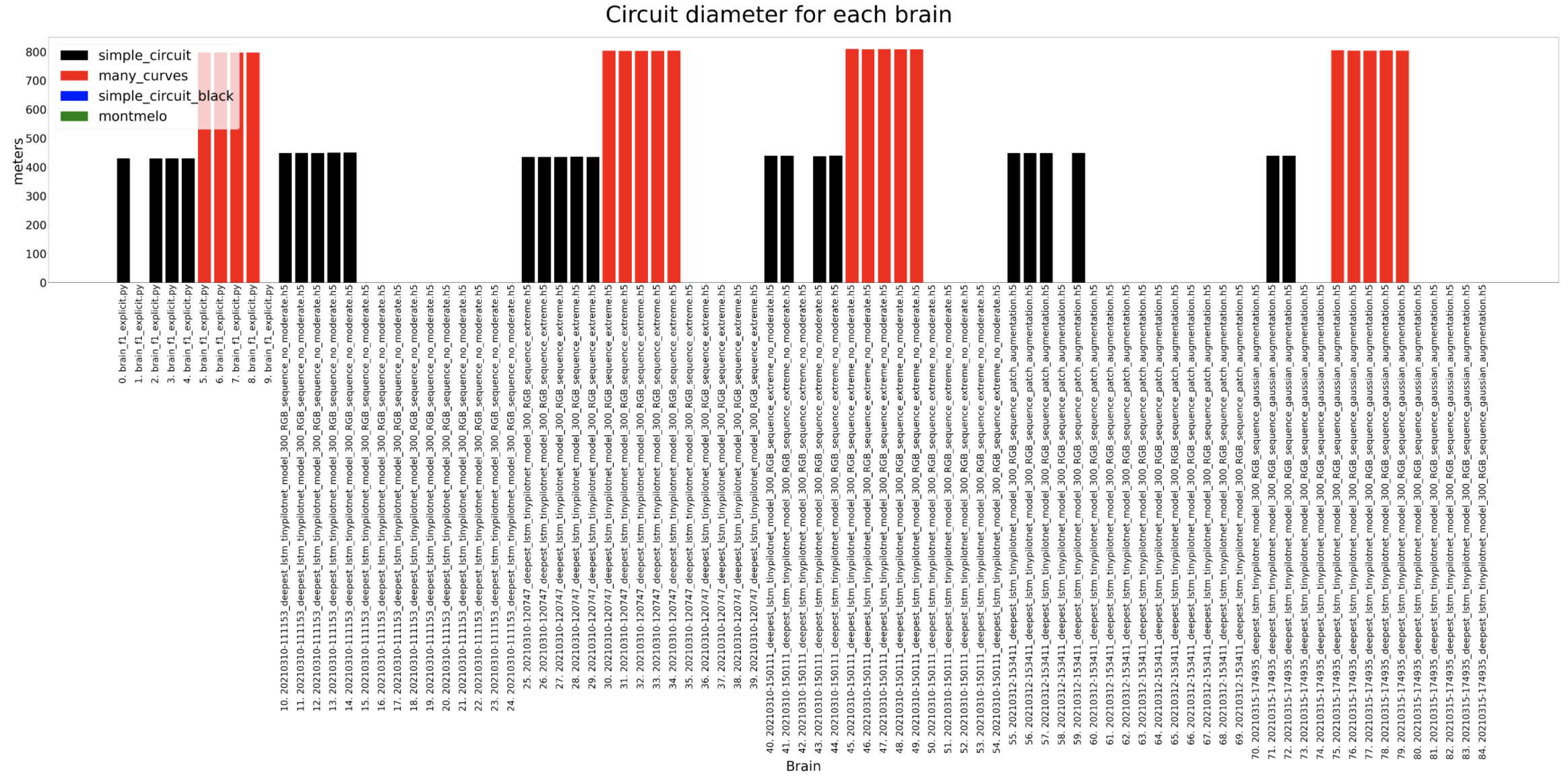
1. Results for different data augmentation strategies
In the experiment, different data augmentation strategies are explored only using Deepest LSTM Pilotnet architecture. This experiment started in the last section of last week’s blog and here are the results of all the different strategies. These experiments are:
- Remove moderate data from the dataset. Data sequences with a majority of low turn values are removed.
- Add extreme sequences twice to the dataset.
- Add extreme sequences twice and remove moderate sequences.
- Add patched images to the dataset. The image red line is removed and added to the dataset.
- Add gaussian noise to the dataset.
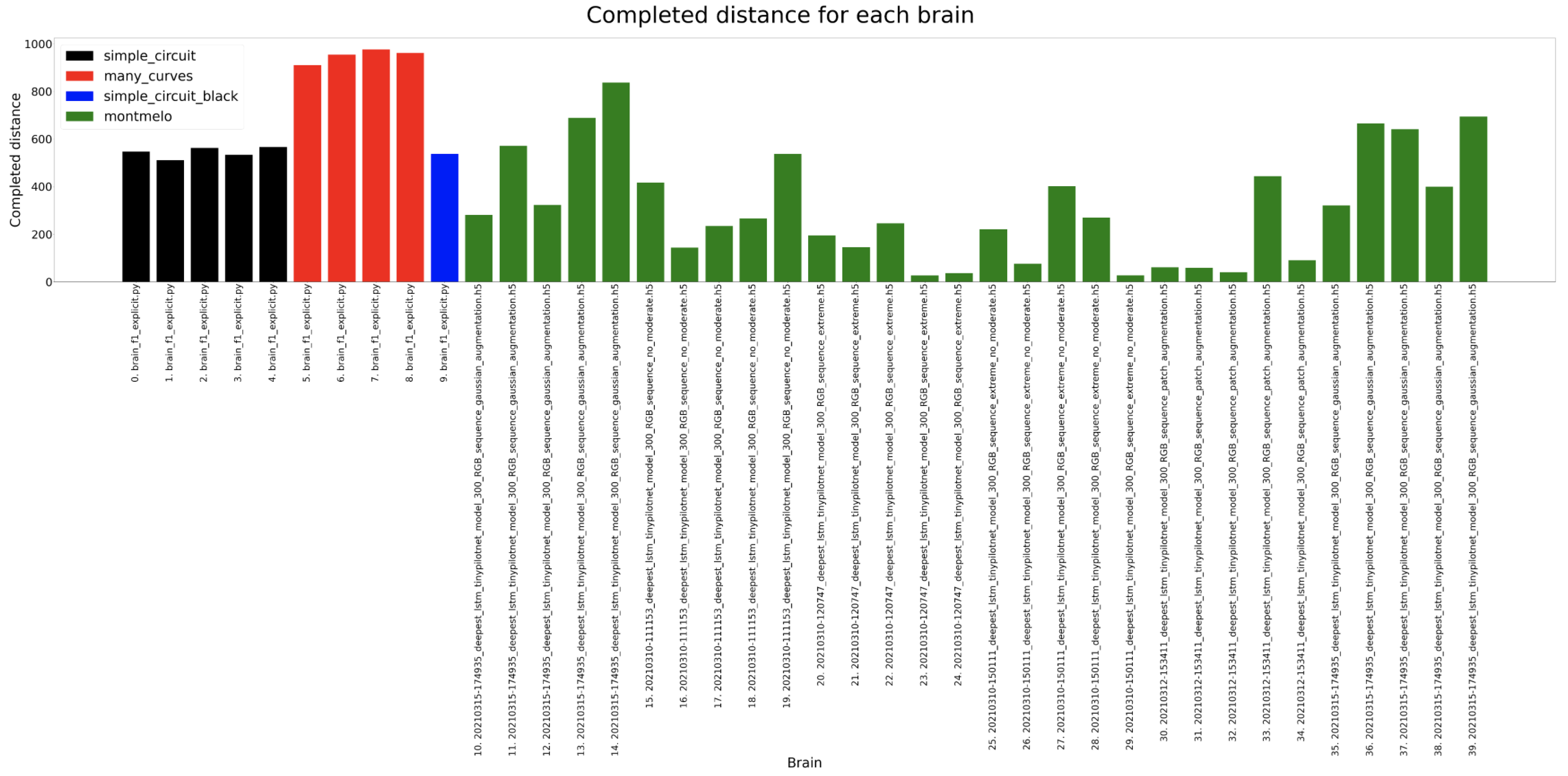
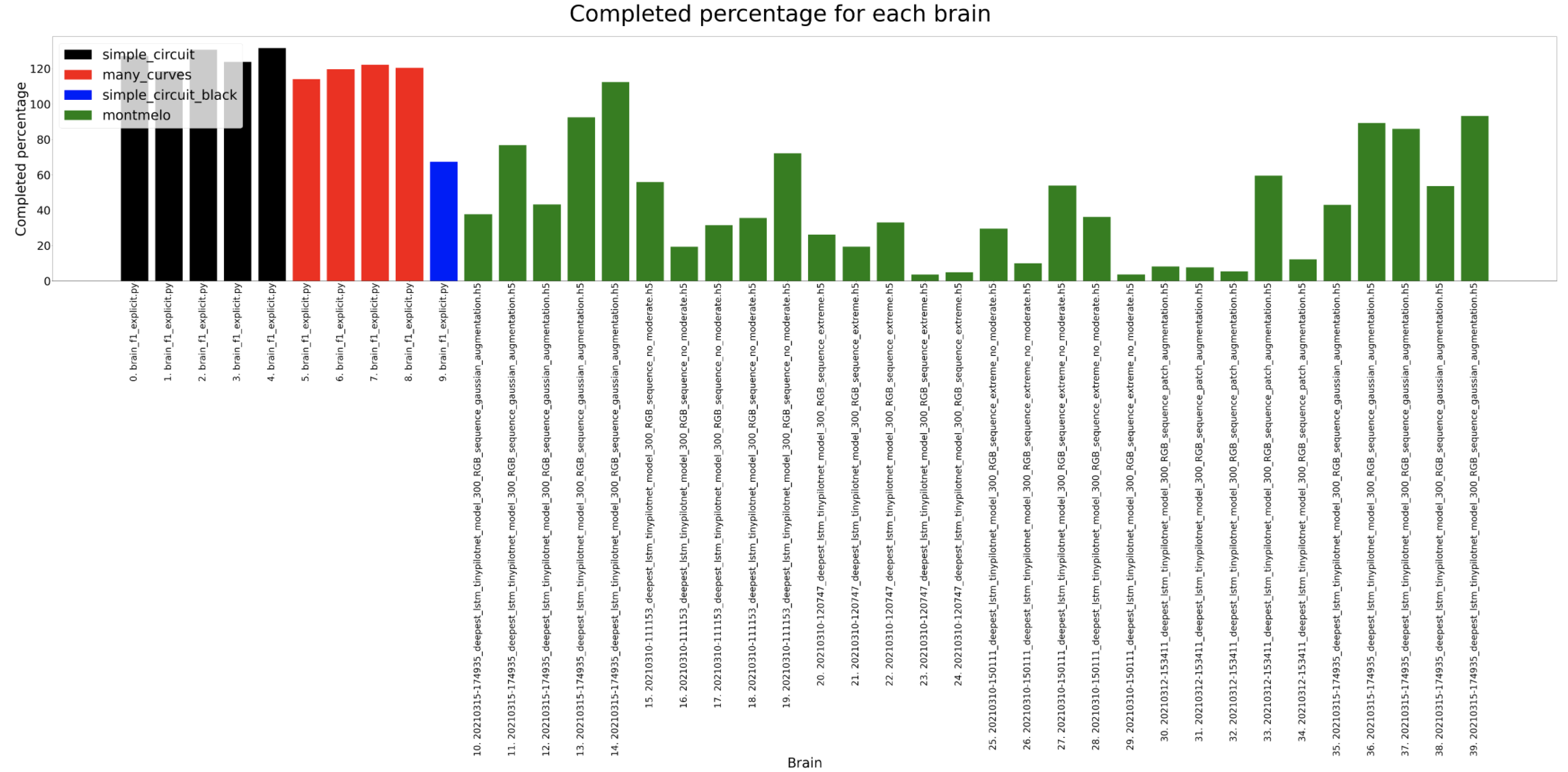
In this case, the results show that they still can’t complete the Montmeló circuit but most of then can complete the rest of the scenarios.
Click on the images to expand them.
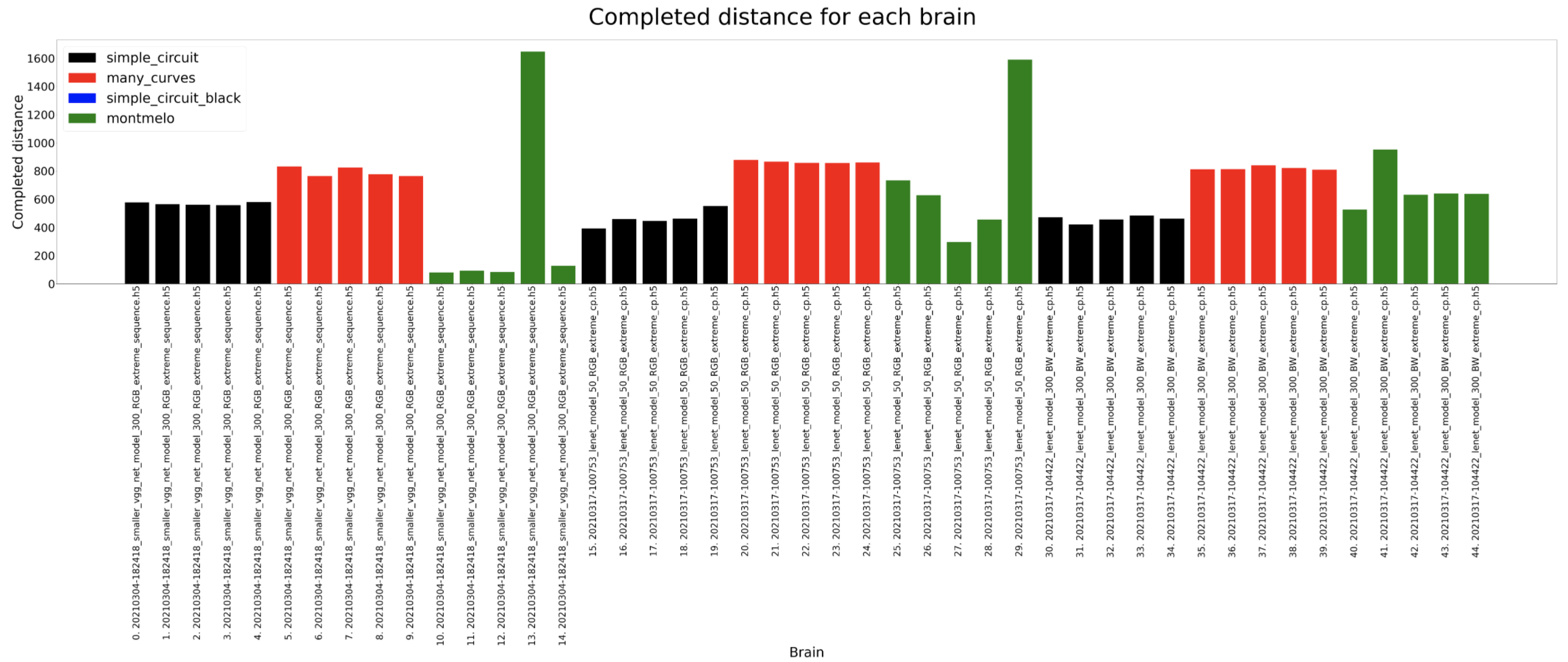
Completed distance
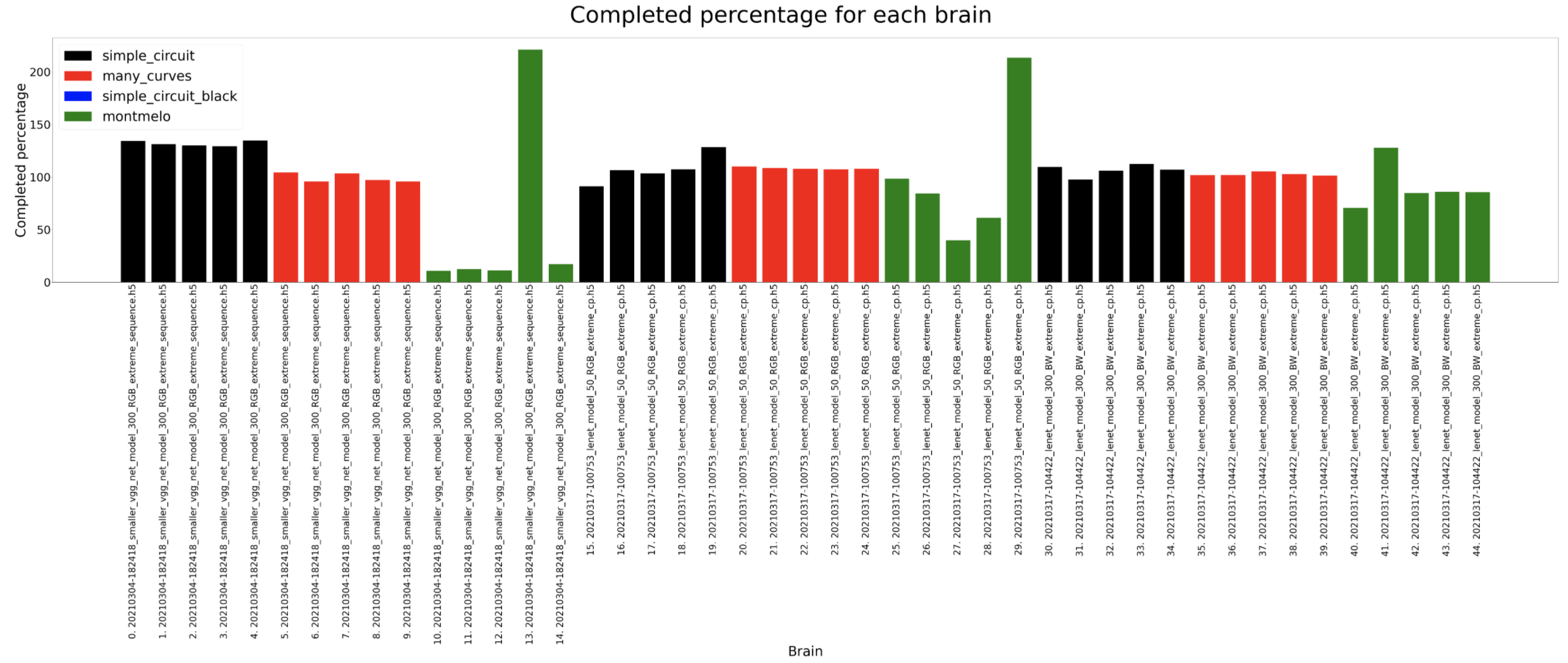
Completed percentage
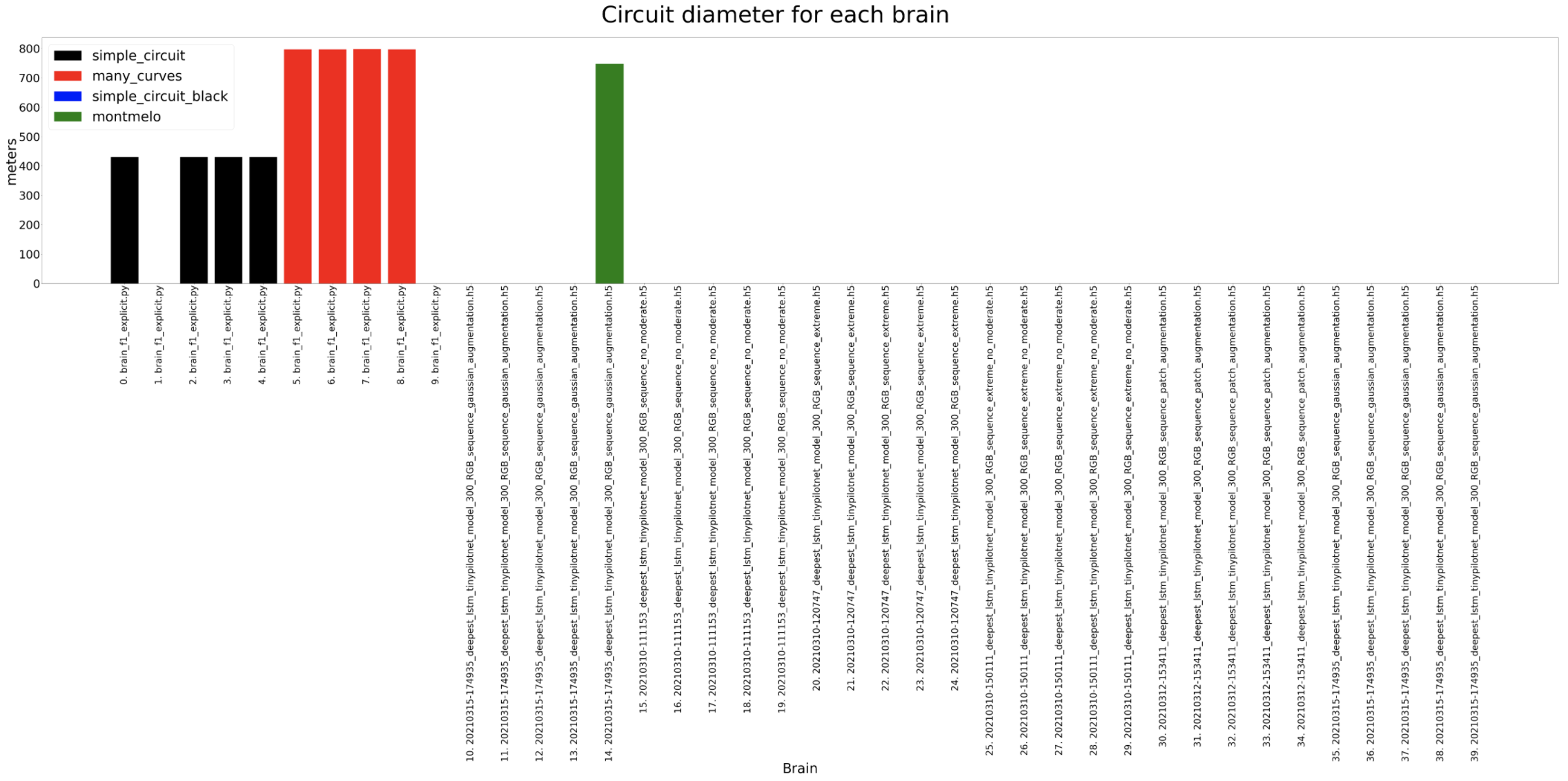
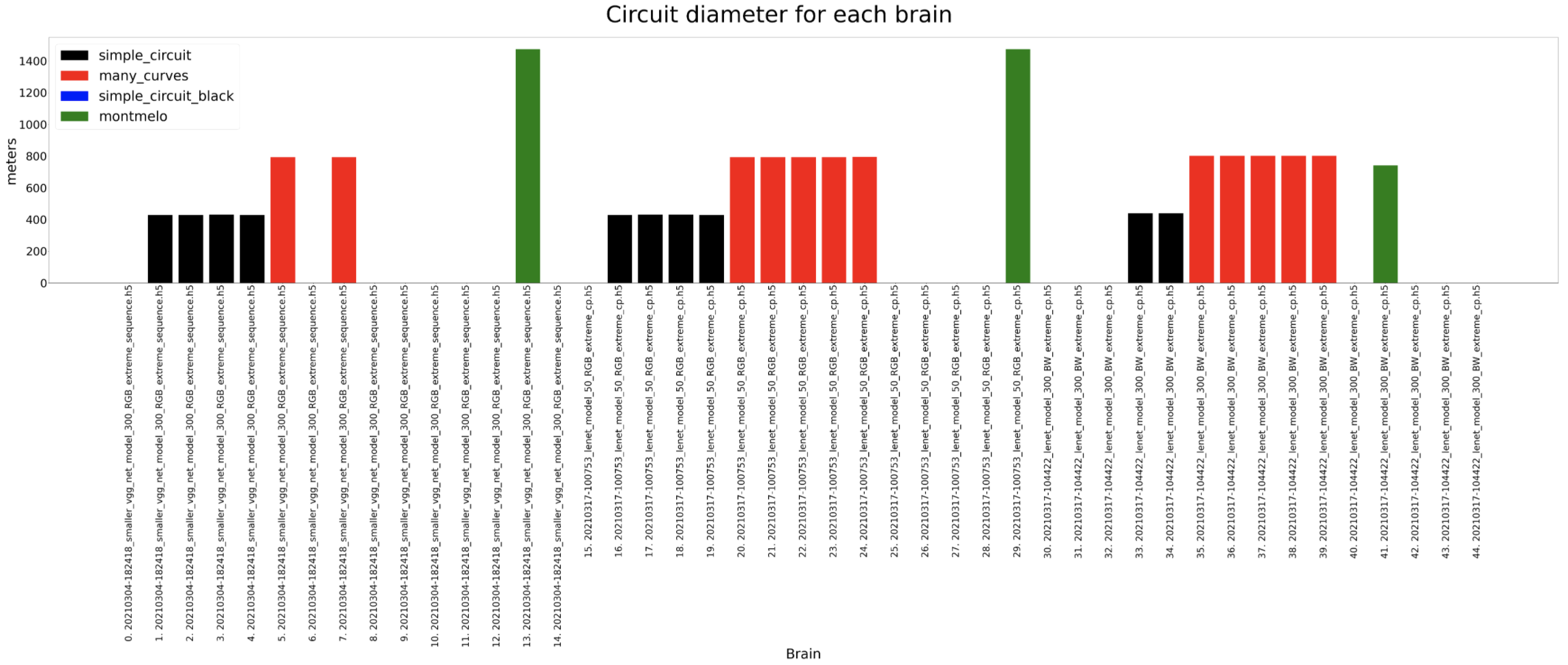
Circuit diameter
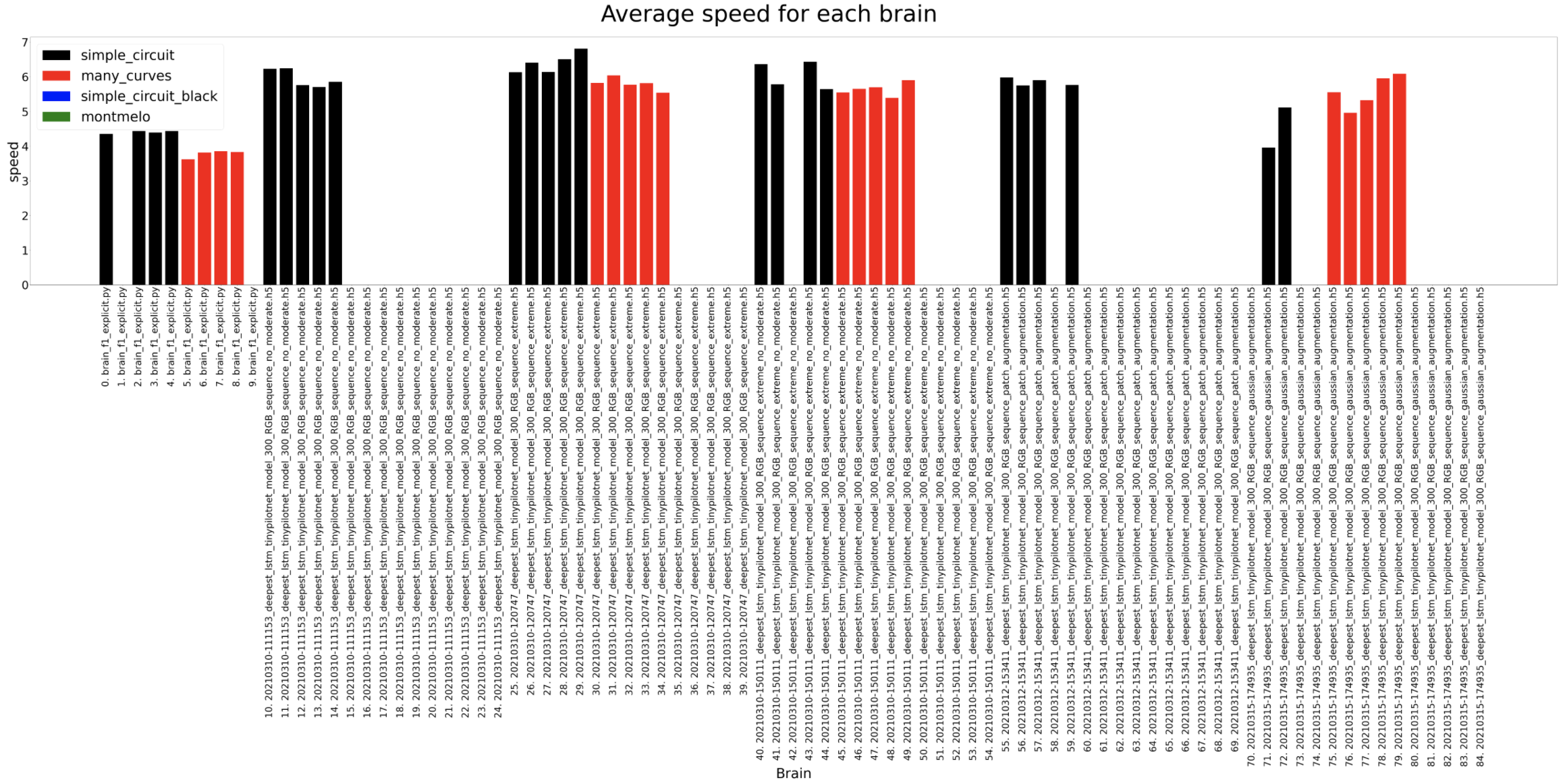
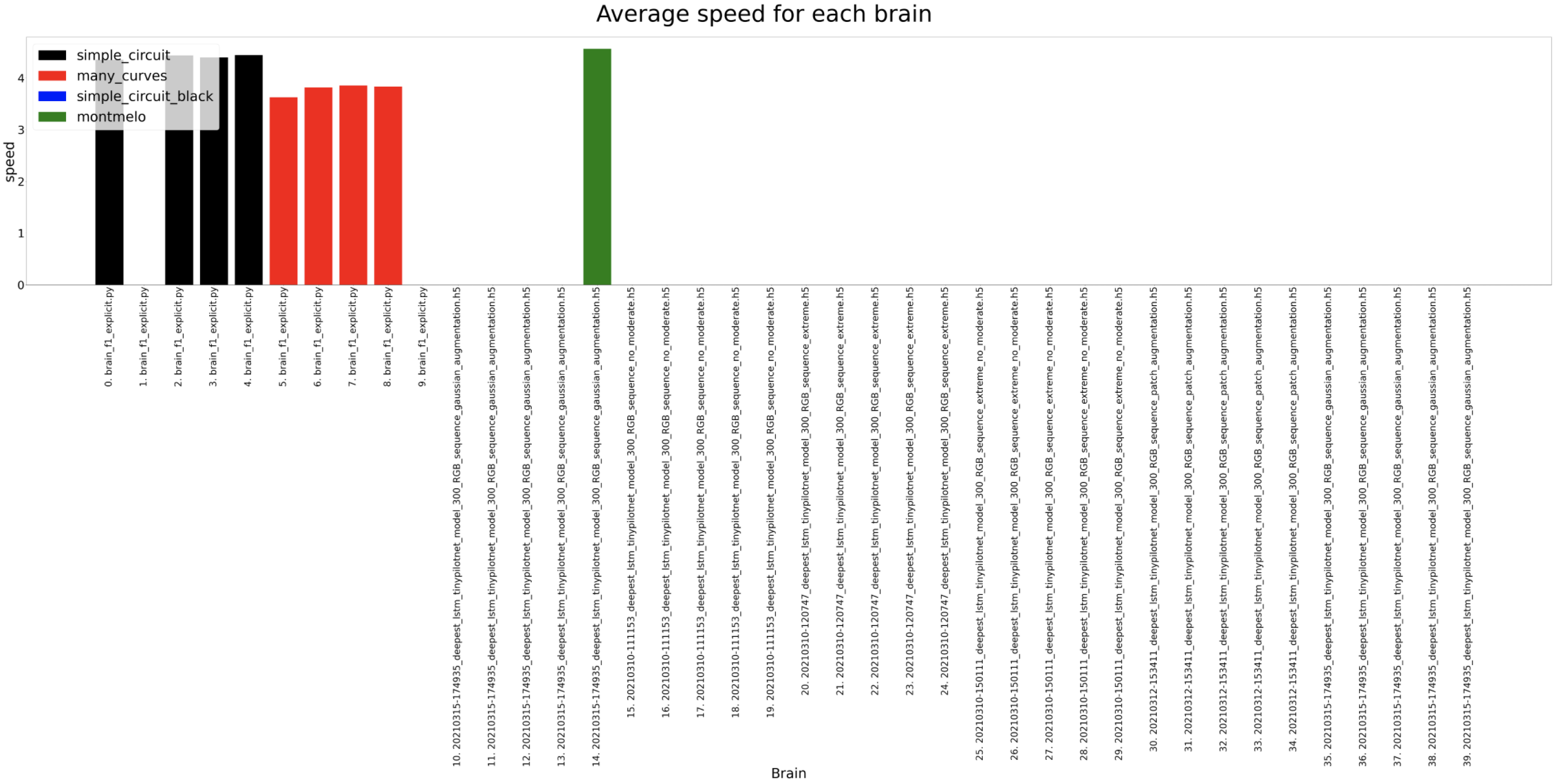
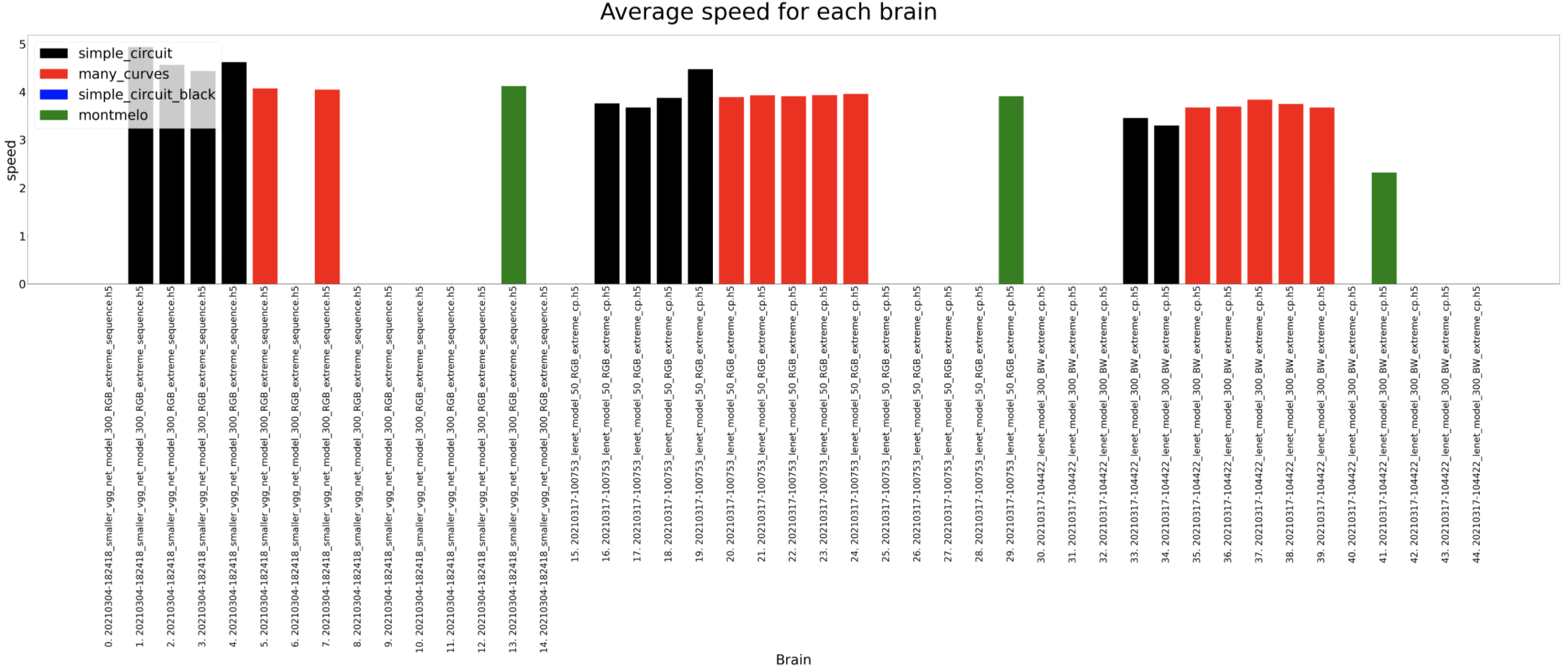
Average speed
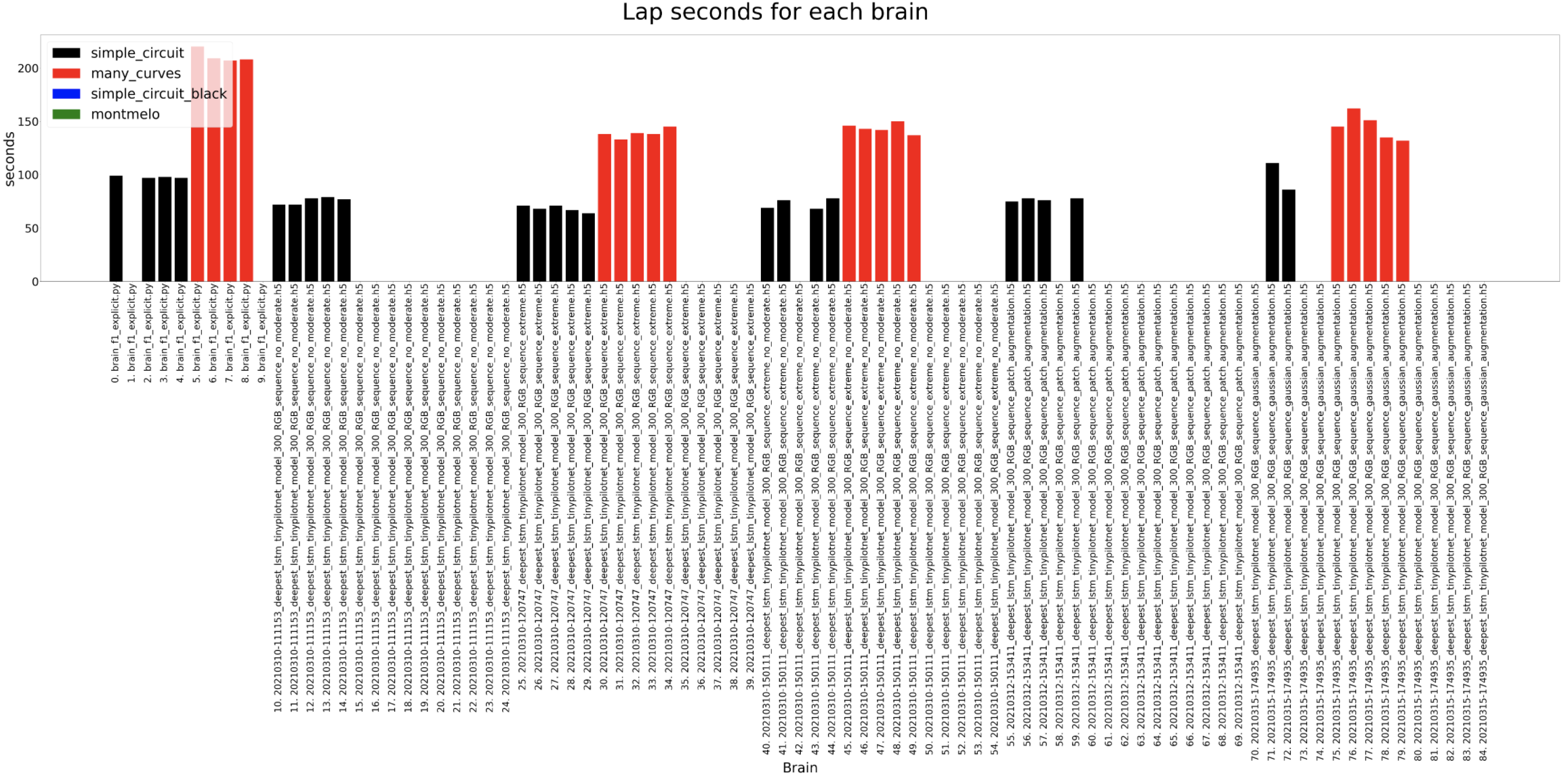
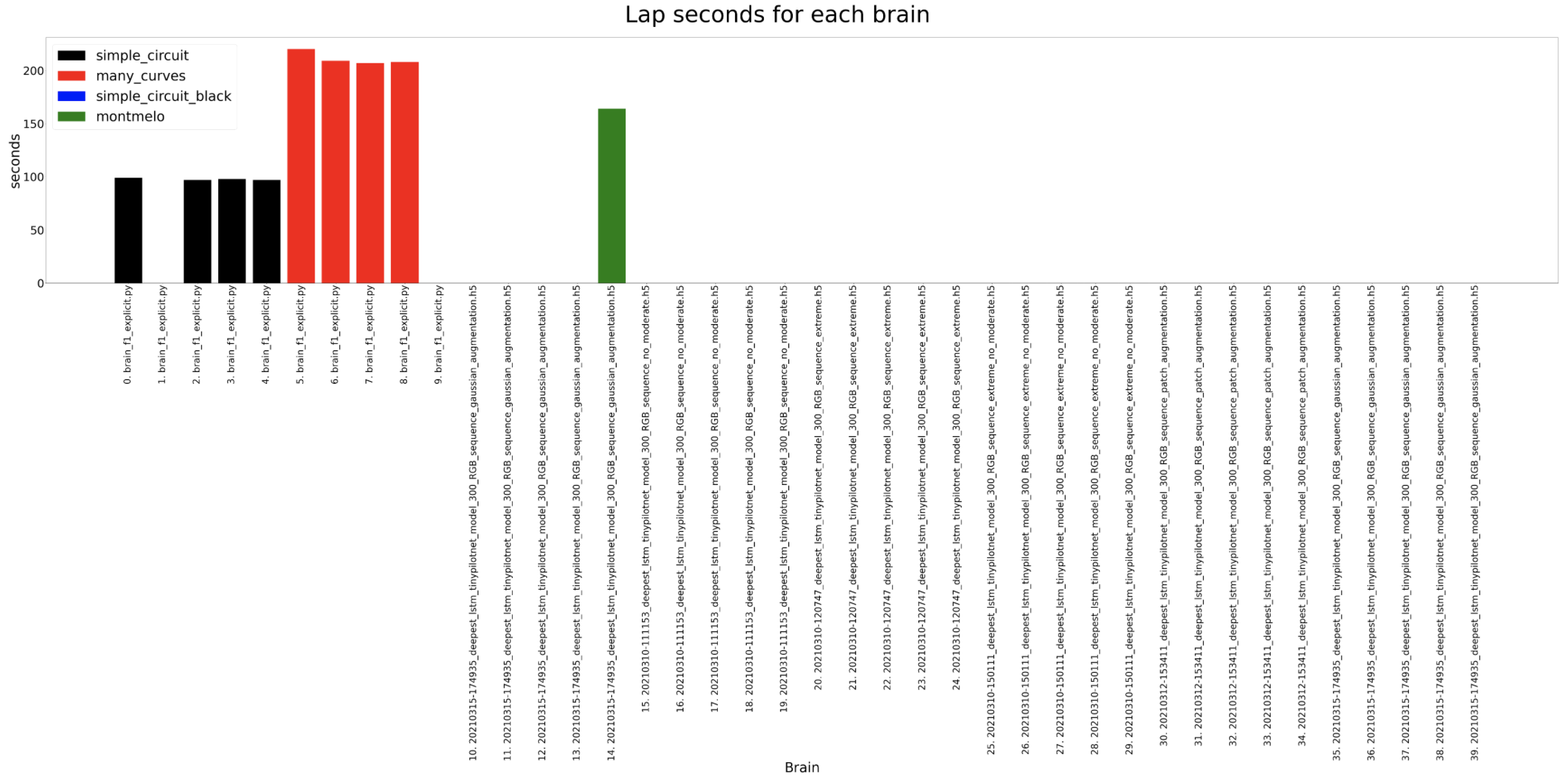
Lap seconds
2. Results for different data augmentation strategies only in Montmeló
More experiments for the same nets in Montmeló. In this case, we can see that the network trained with gaussian noise data augmentation is the best one even completing the circuit once. It is the only regression based network that has completed the circuit so far. It’s also important to consider that the experiments start on a random position and rotation in the circuit.
Completed distance
Completed percentage
Circuit diameter
Average speed
Lap seconds
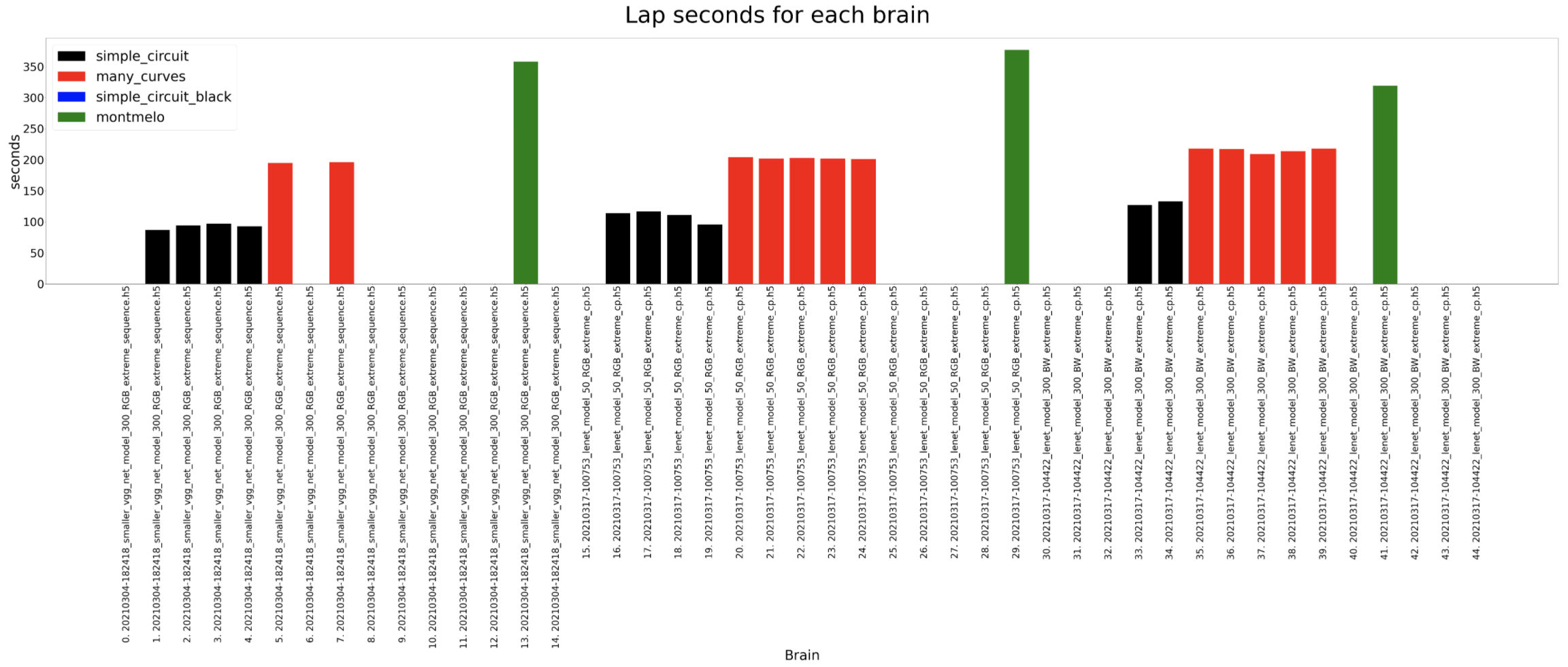
3. Results for LeNet classification
For this experiment, we have considered the famous LeNet architecture from Yann Lecun et al. This architecture accepted 32x32 B/W images as input and has 90000 parameters in it’s LeNet-5 structure. The number of parameters in the case of B/W images is comparable to the Deepest LSTM one, so we tested it’s performance to have a fair comparison. We have 2 new networks in this case, one accepting B/W images (we transform the dataset to make it suitable for this scenario) and other accepting color images (RGB). The experiments show that even this classification networks can complete the different circuits (even Montmeló).
Completed distance
Completed percentage
Circuit diameter
Average speed
Lap seconds