Review of current neural architectures used
These are the current 4 neural approaches explored for controlling the robot.
Pilotnet
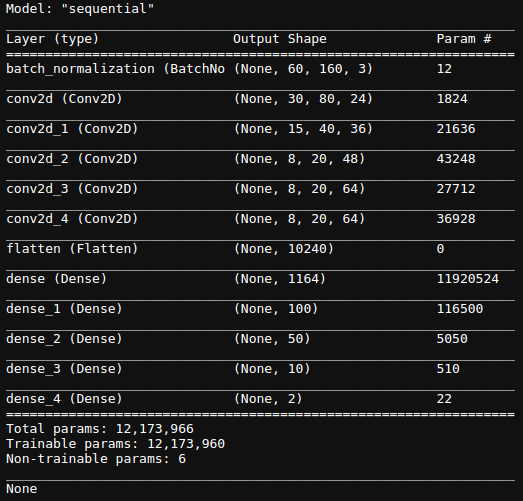
- BatchNorm
- Conv2D x 5
- Flatten
- Dense x 5
Deepest LSTM TinyPilotnet
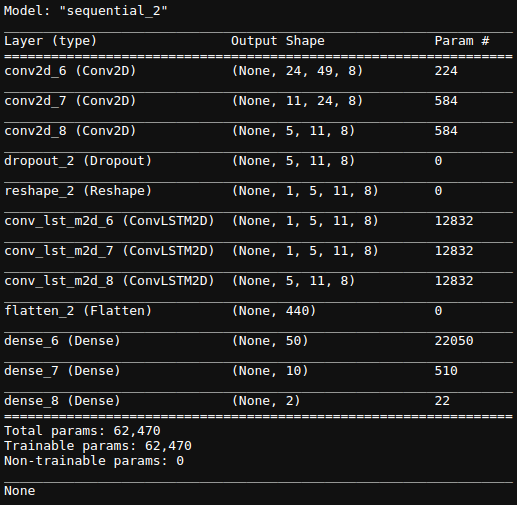
- Conv2D * 3
- Dropout
- Reshape
- ConvLSTM * 3
- Flatten
- Dense * 3
Pilotnet 3D (with memory)
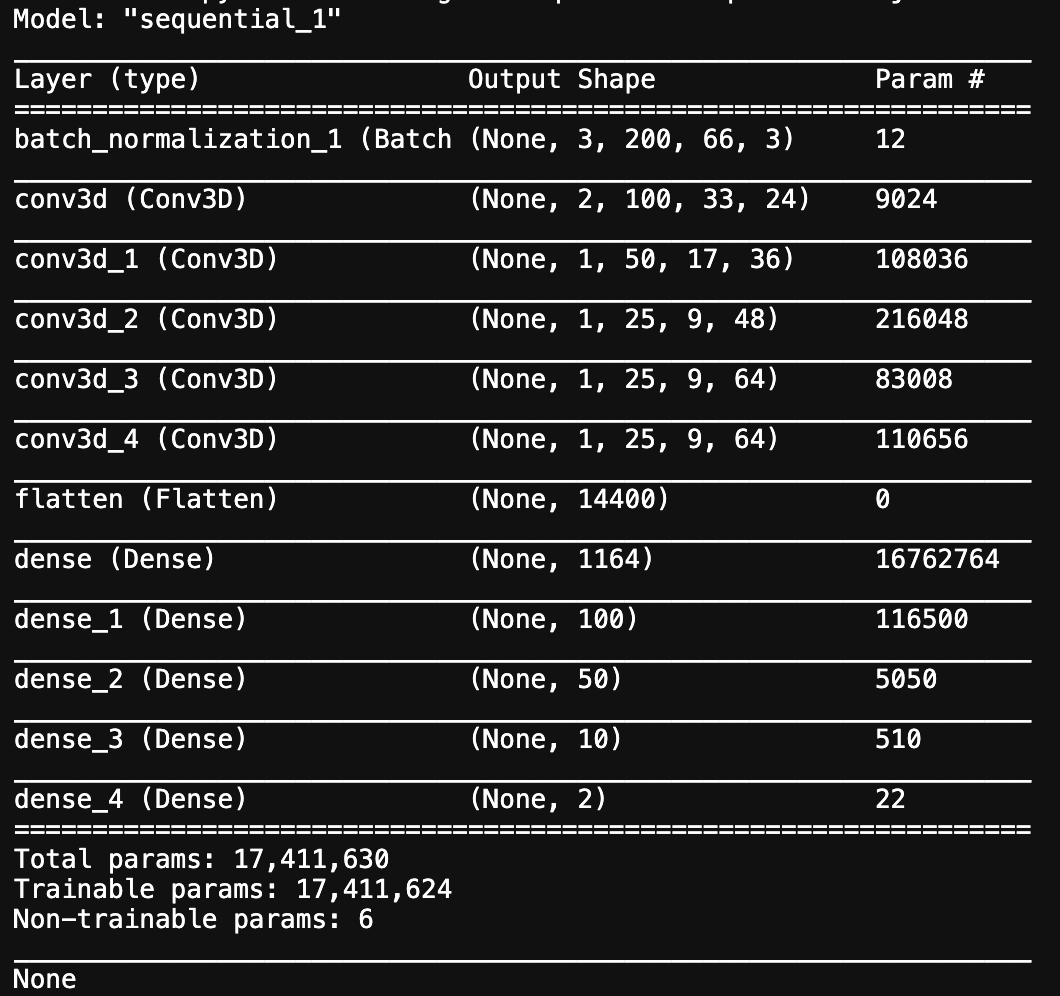
- BatchNorm
- Conv3D x 5
- Flatten
- Dense x 5
Deepest LSTM TinyPilotnet 3D (with memory)
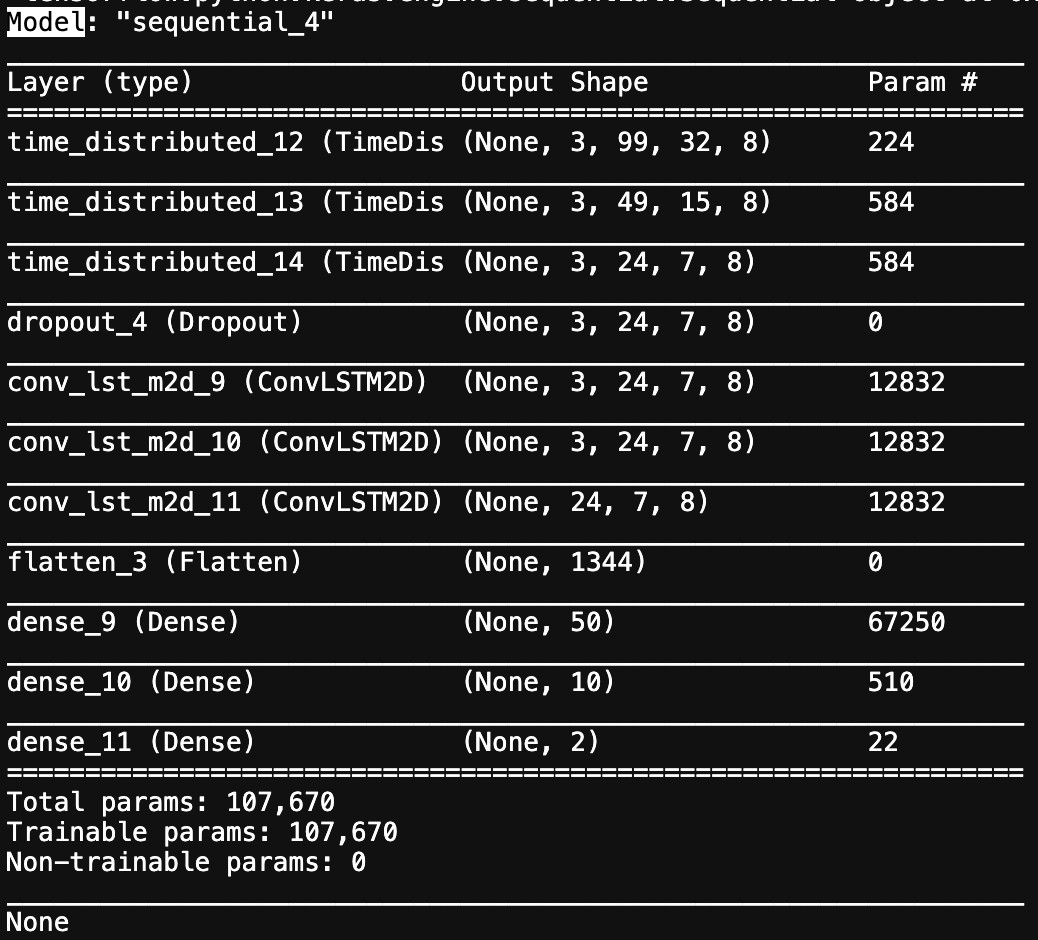
- TimeDistributed(Conv2D) * 3
- Dropout
- Reshape
- ConvLSTM * 3
- Flatten
- Dense * 3