Week 14
WEEK 14
Marked Visual Location
- What is marker-based visual localisation?
-
One strategy for determining the pose of a vehicle using absolute measurements is by placement of beacons at known positions in the environment in order to facilitate the localisation of the robot. This technique is one of the most accurate in the field.
-
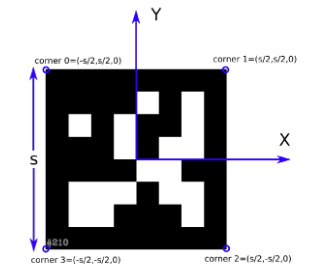
Aruco is an open source library based on OpenCV that allows the detection of square reference markers in images. reference square markers in images. Each marker is delimited by a black outer border and an inner region encoding a binary pattern. binary pattern. This binary pattern is unique and identifies each marker.
-
The following figure shows an example of the operation of the particulate filter. At the initial instant the particles are uniformly distributed in the environment. As new observations are obtained, the particles accumulate in probability zones until they converge to the probability zone:
-
-
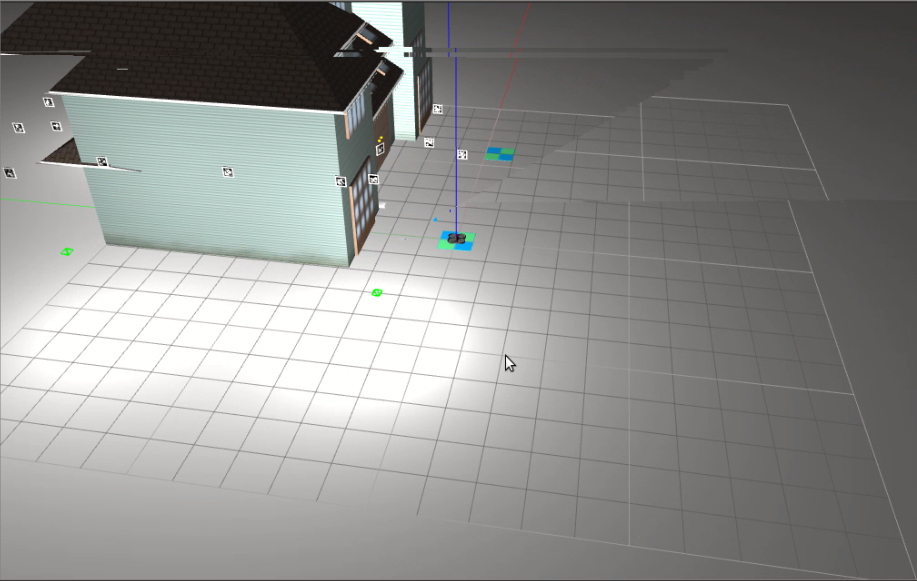
We are developing an exercise for marker-based visual localisation.
- The necessary web template has been developed for the exercise.
- Textures and the world of the Gazebo simulator have been improved.

To be done
- It would be necessary to add a reference solution and improve the HAL and GUI API.