
Semana 3: Cámara de Turtlebot2 físico, Beta testing de algunos ejercicios y problemas con Gazebo
El trabajo que he llevado a cabo esta semana se divide en 3 apartados.
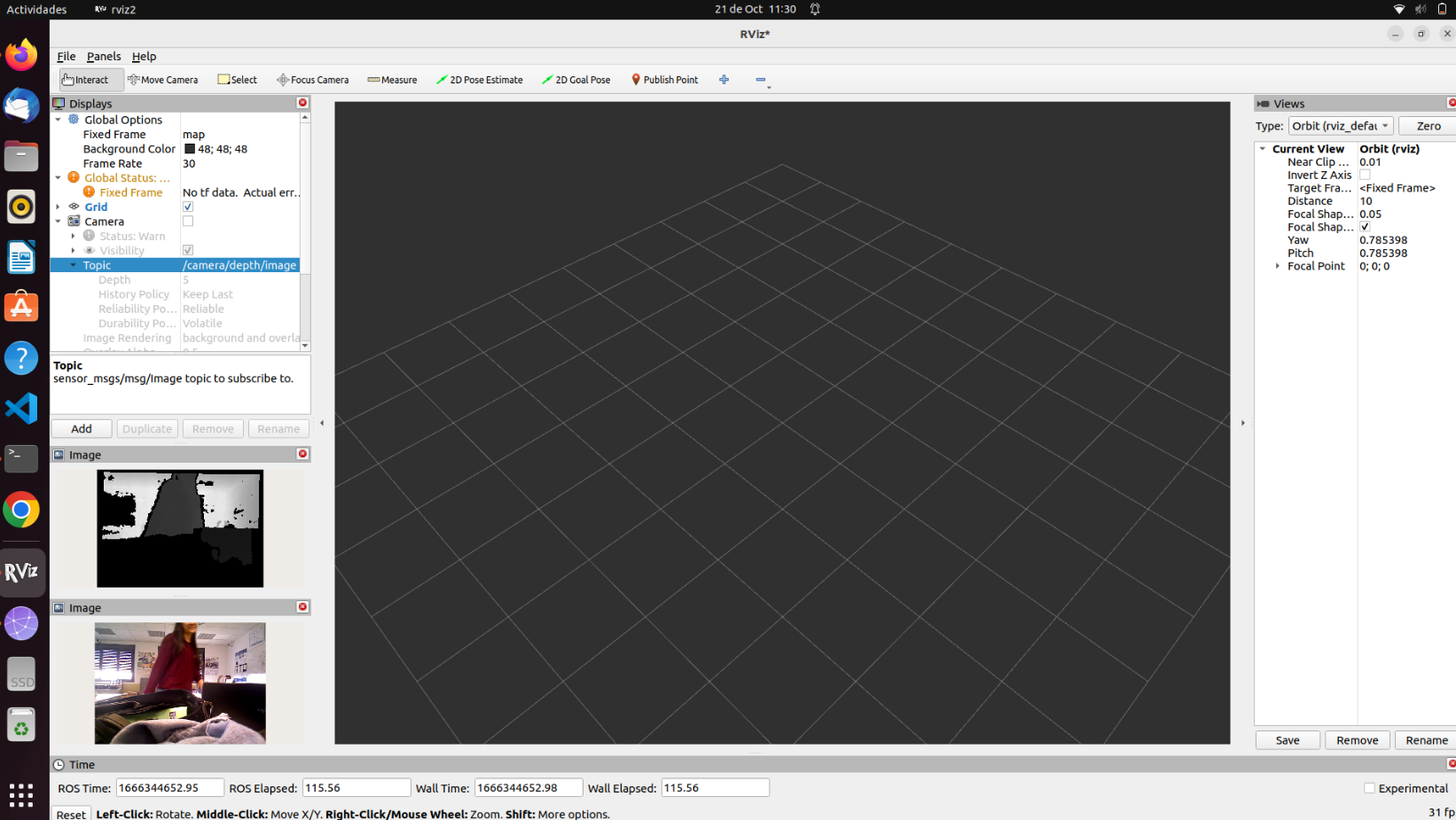
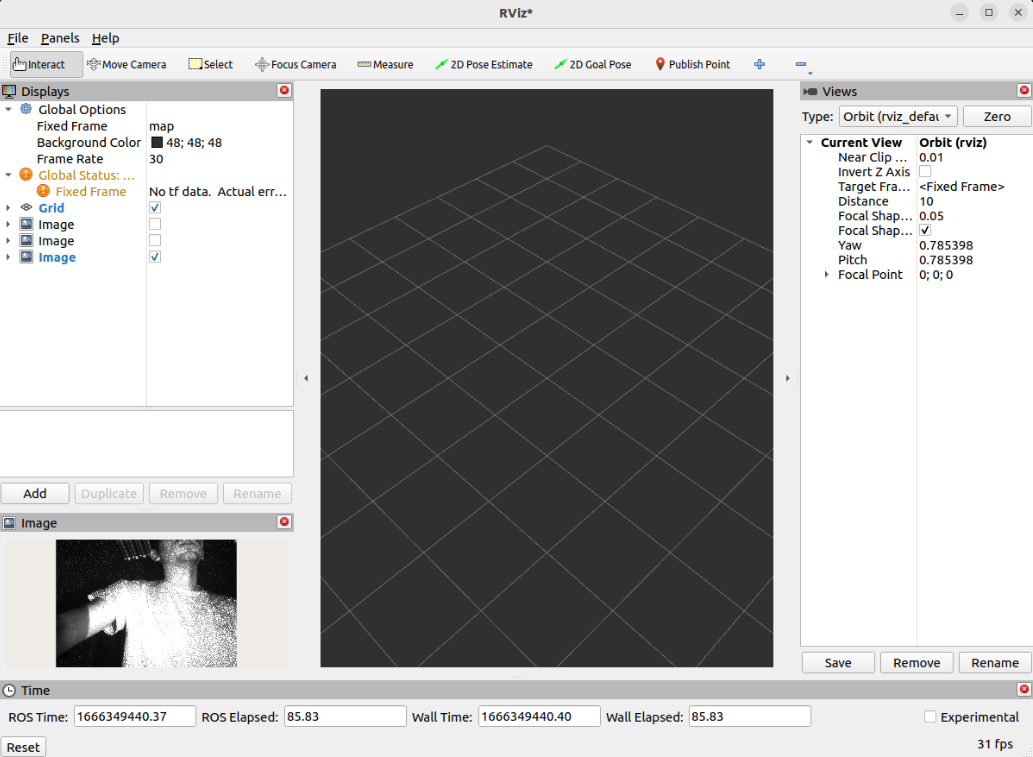
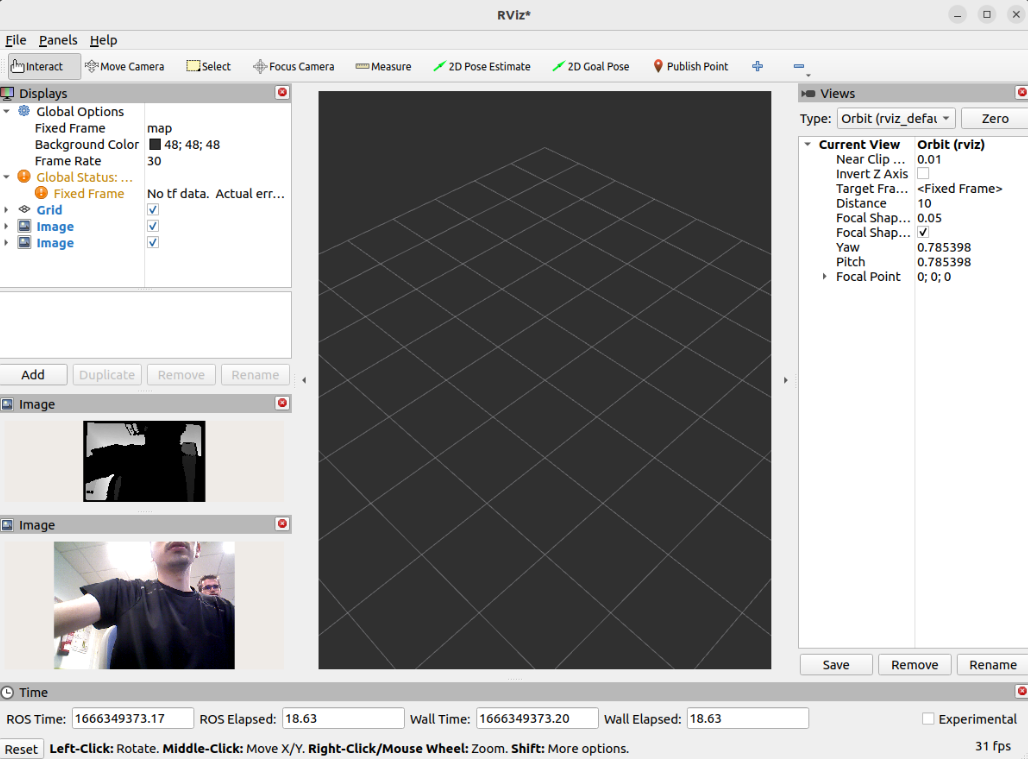
Usar la cámara del turtlebot2, para poder usarla he tenido que instalar los drivers de la cámara, obtenidos del siguiente (repo), tras ello instalar un par de dependencias del libsub y ya ha funcionado perfectamente.
Imágenes de la cámara en el RViz desde distintos topics de la cámara:
Lo segundo que he hecho es hacer beta testing de 3 ejercicios de Unibotics: VFF, GPP y Dron Rescue People.
Las pruebas con los tres han ido bien, salvo un error en el GPP que impide coger el mapa mediante la API dada por la página. Y del Dron Rescue People no he probado nada de reconocimiento de caras aún. Todas estas pruebas en remoto por el siguiente apartado a mencionar.
Los problemas con el Gazebo. Me impiden usar Unibotics en local backend y lo peor, no me deja ejecutar ningún mundo de Gazebo por erroes de dependencias. Las dependencias que me faltan no las he podido encontrar en Internet y no sé aún por qué:
- libignition-transport8.so.8.3.0
- libignition-msgs5.so.5.10.0
- libignition-common3.so.3.14.2
- libignition-common3-graphics.so.3.15.0
- libignition-fuel_tools4.so.4.6.0