
Semana 20. Seguimos con el ejercicio Follow Person…
La semana pasada nos quedamos en que el turtlebot2 no completaba la tarea de follow y la razón es debido a que no realiza la detección de persona. El problema está en que HAL.getImage() devuelve una imagen vacía e investigando un poca más en profundidad se ve que es porque no se hace correctamente el callback de la cámara ni laser. No he conseguido solucionarlo pero con la intención de averiguar dónde y qué está pasando, he hecho varias comprobaciones:
- Comprobar que el nodo de la cámara se está suscribiendo correctamente al topic mirando el número de suscriptores.
ros2 topic info /depth_camera/image_raw
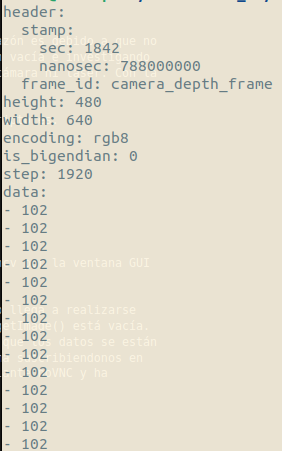
- Comprobar que se está publicando correctamente los datos en el topic.
ros2 topic echo /depth_camera/image_raw
- Además, he creado un nodo que se suscribe al topic /depth_camera/image_raw y muestra la imagen devuelta en opencv por la ventana GUI de nuestra página web mediante noVNC.
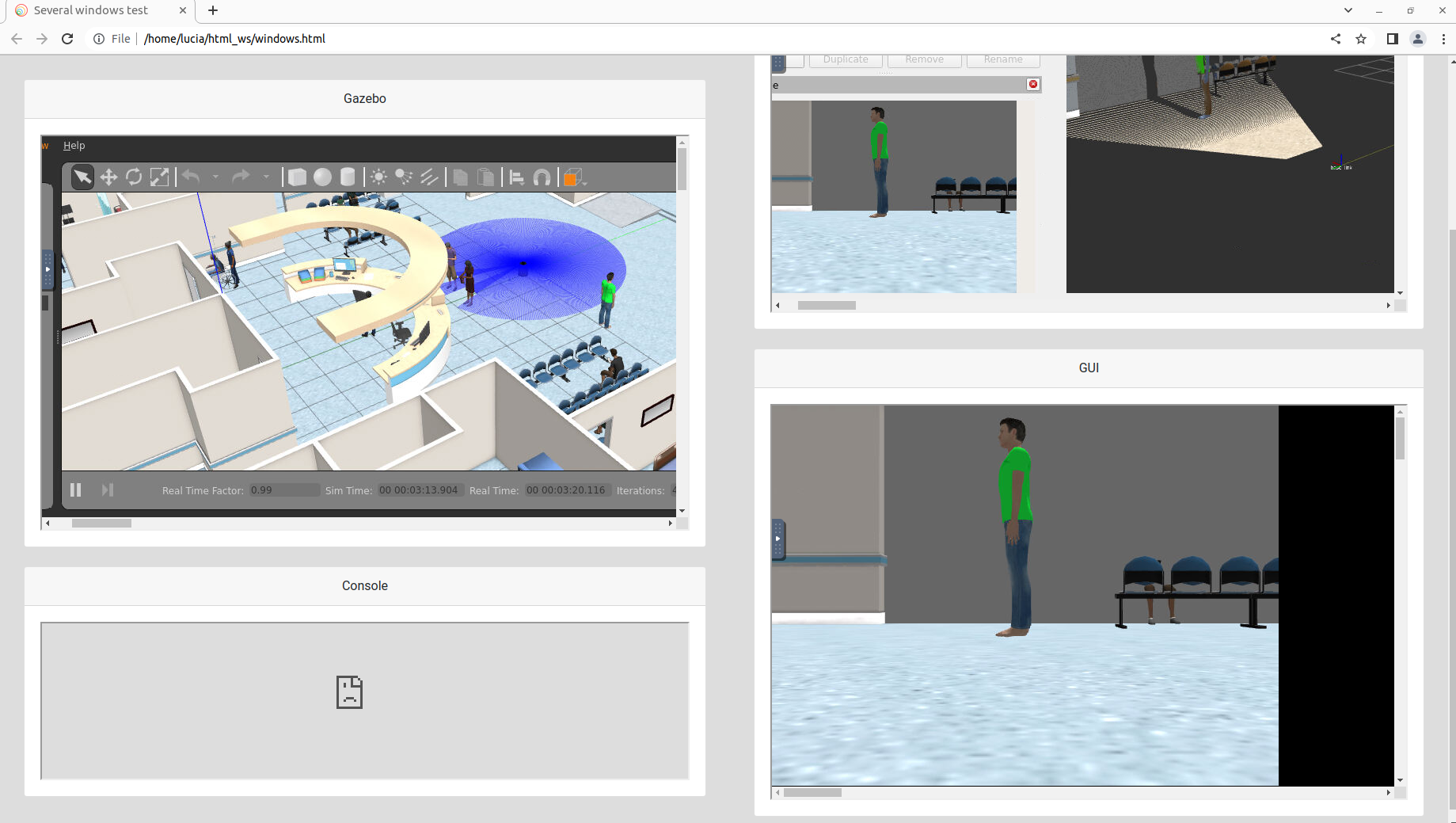
Tras hacer estos tests he concluido que el problema se focaliza en el exercise.py y los ficheros relacionados para su funcionamiento (hal.py, camera.py…), por lo que me tendré que centrar en estos ficheros.
Y otra de las tareas de esta semana es estudiar el nuevo manager, RAM .