
Semana 27. Follow Person e inicio de migración del ejercicio Real Follow Person
Tarea 1: probar RADI 4.3.2 (ejercicio Follow Line y Basic Vaccum Cleaner)
En la siguiente tabla se muestra los resultados obtenidos
| Ejercicio | RTF -> RTF con GPU | FPS -> FPS con GPU |
|---|---|---|
| Follow Line | 0.75 -> 0.99 | 10 -> 62 |
| Basic Vaccum Cleaner | 0.99 -> 1 | 13 -> 62 |
Utilizando aceleración gráfica se puede apreciar una clara mejora tanto en la visualización como en la fluidez de renderizado.
Tarea 2: persona desplazandose (ejercicio Follow Person Simulado)
La segunda tarea es hacer que la persona se desplace por el hospital recorriendo unos waypoints. Se ha partido del plugin que hizo Carlos Caminero en su TFG, pero apagando la opción de teleoperar poniendo la variable auto_move siempre a true, de manera que la persona empieza a moverse una vez que se ponga a correr el ejercicio tras pulsar el botón run.
A continuación, se muestra un vídeo con el Turtlebot2 siguieno a la persona (el código de prueba que se ha utilizado es este)
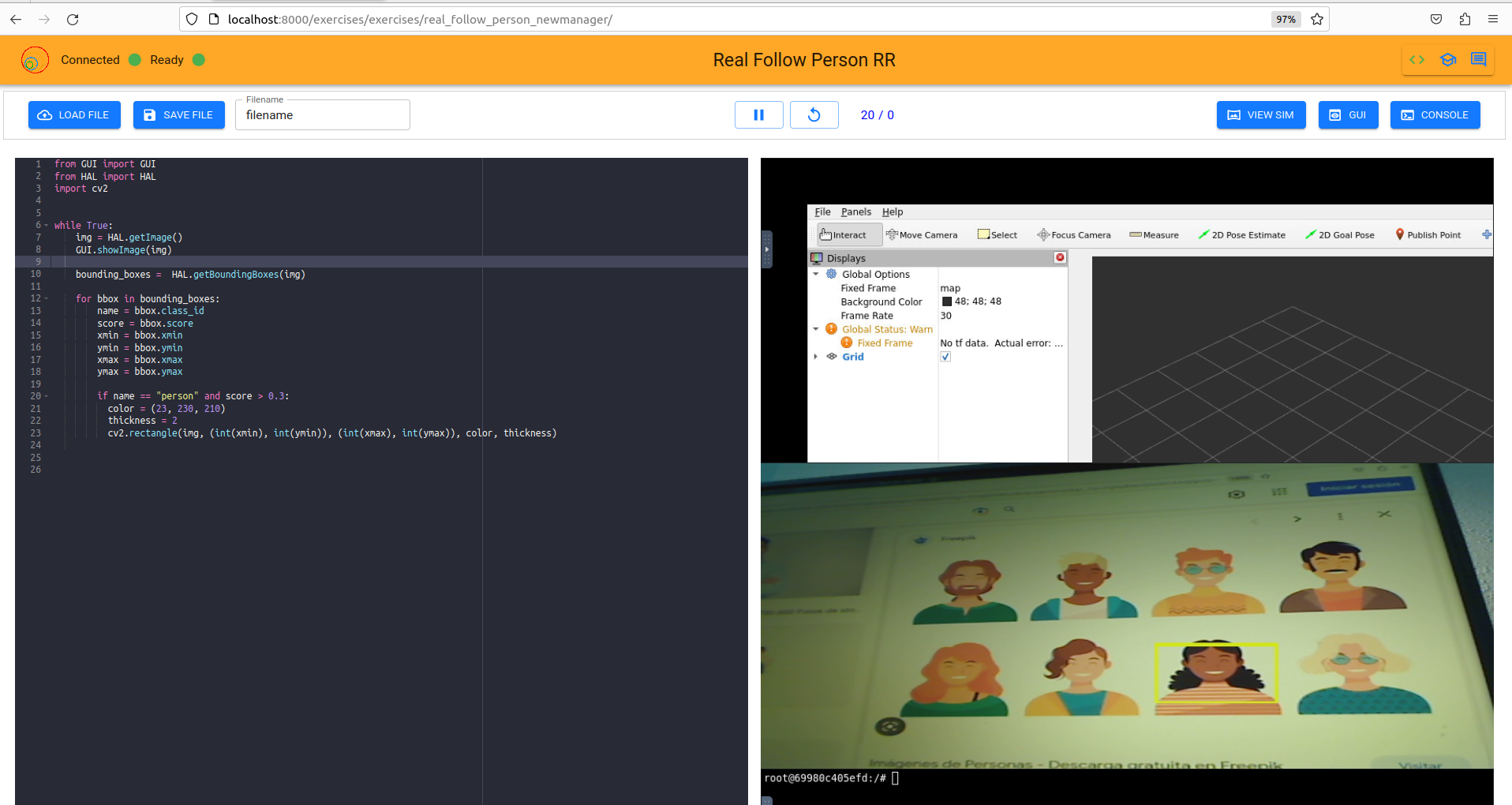
Tarea 3: migrar el ejercicio Real Follow Person
Esta semana he estado principalmente con la cámara intentando que se muestre la imagen por la ventana GUI. Debido a que mi portatil no consigue funcionar correctamente con la cámara Asus Xtion, se va a utilizar una webcam en su lugar.
Me he basado en las plantillas que se ha estado utilizando para el ejercicio simulado. Pero una diferencia de utilizar el robot real en vez el simulado es que ya no se necesita gzclient, de momento, lo que he hecho es que cuando se detecta que tiene acceso al dispositivo /dev/video0 (el de la cámara), en lugar de lanzar gzclient lanza rviz2. Por ahora, esto se hace directamente en el fichero launcher_gazebo_view.py.
El driver que se ha utilizado para la cámara es este.
Algunos otros pasos que se ha tenido que hacer para que funcione correctamente
- añadir en el docker base:
add-apt-repository universe apt install ros-${ROS_DISTRO}-usb-cam - Crear contenedor dando acceso al dispositivo /dev/video0
sudo docker run --name webcam_test --device /dev/video0 --rm -it -p 2303:2303 -p 1905:1905 -p 8765:8765 -p 6080:6080 -p 6081:6081 -p 1108:1108 -p 6082:6082 -p 7163:7163 jderobot/robotics-academy:4.3.1