Semana 41. Preparación del ejercicio Amazon Warehouse
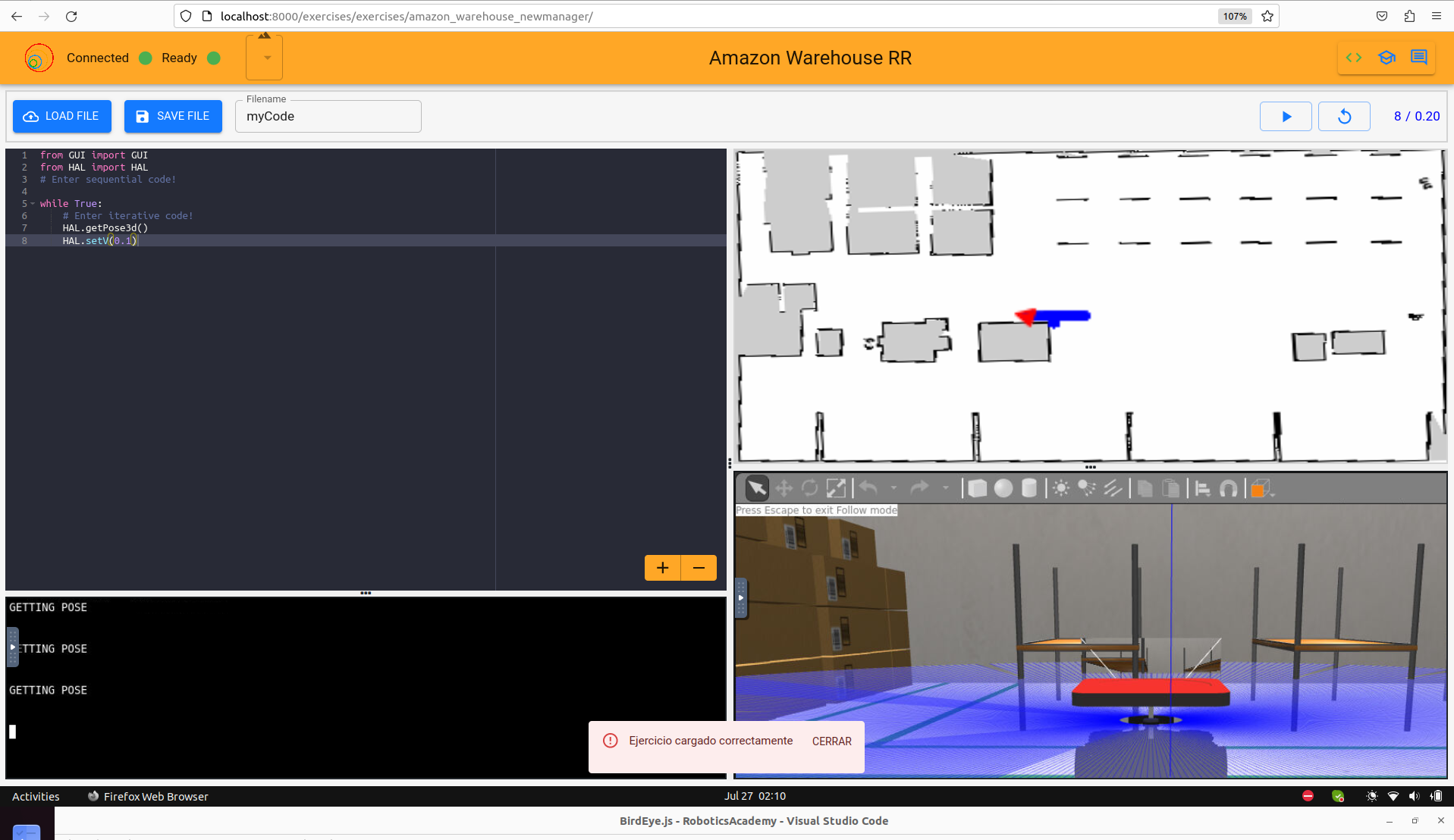
Hace varias semana, basandome en la plantilla del ejercicio Vaccum cleaner, conseguí añadir el mapa en la página web mostrando el robot como un triángulo, pero no logré que la posición del robot se actualice en el mapa cuando se mueve. Y en esta semana, he seguido con esta tarea.
He tenido que usar una variabe de memoria compartida para guardar las posiciones “x”, “y”, “yaw”; en el fichero hal.py guardo la odometría del robot en la variable “pose” y luego en gui.py hago una lectura antes de pasarle los datos a la clase MAP. Queda por mejorar la transformación de coordenadas a pixeles para mostrar su movimiento con mejor precisión.