
Semana 52-53. Modelado de un robot logistico ackermann con Blender, betatesting del ejercicio Amazon Warehouse y actualización de la documentación
Nuevo robot BMW robot
A vista de que estoy teniendo bloqueos para avanzar en la solución para robots holonómicos de geometría rectangular, pero estoy encontrando buenas soluciones en robots ackermann, voy a dejar de momento aparte los robots holonómicos y cambiar de rama a estos.
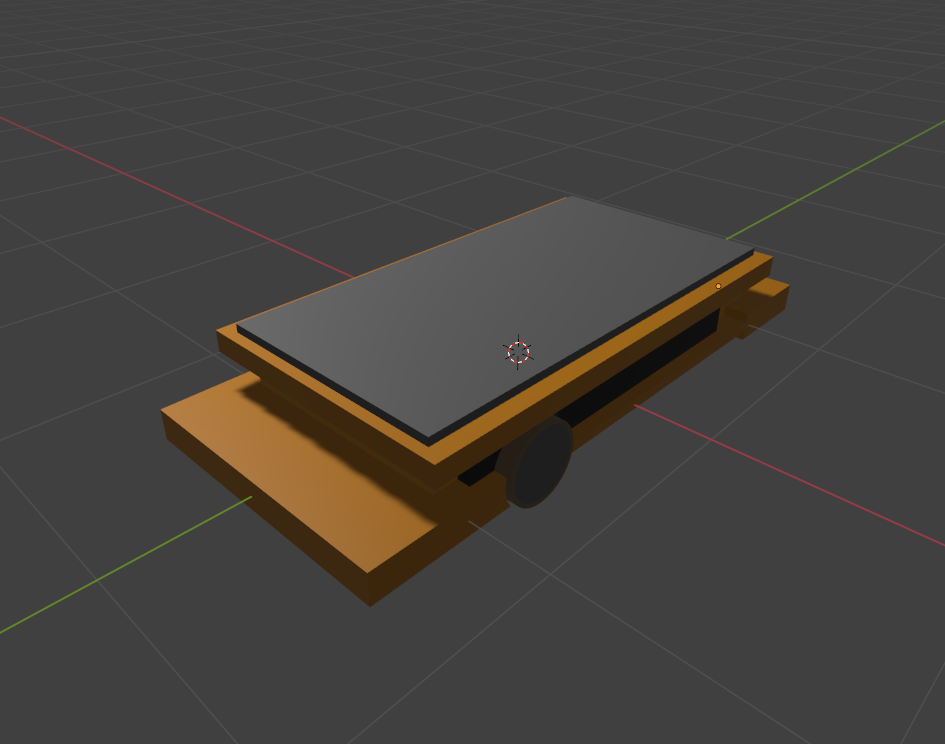
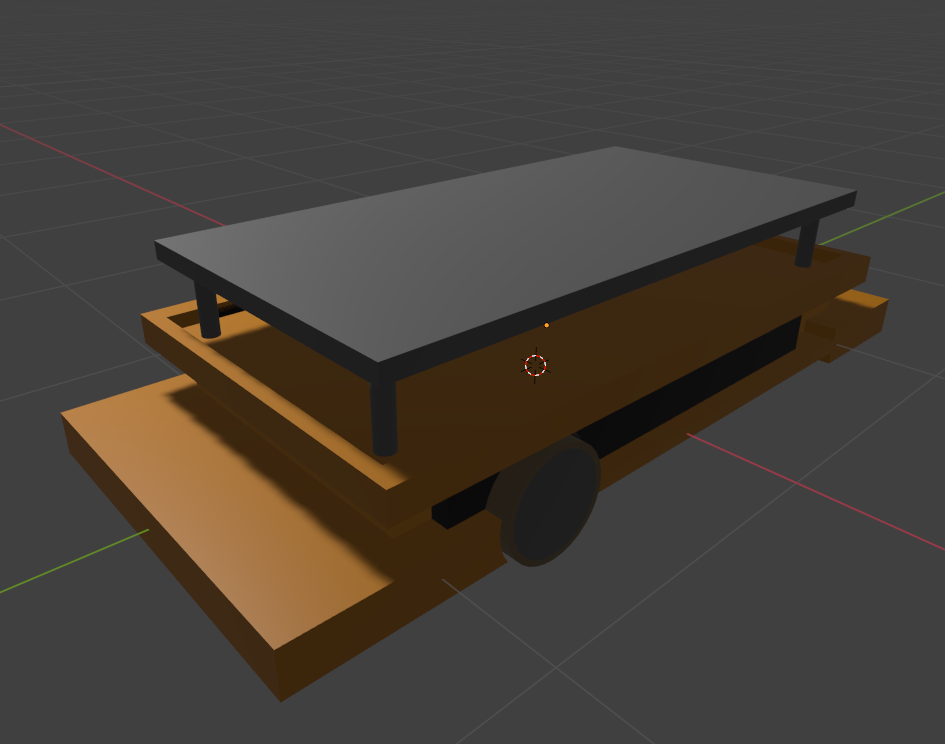
En el repositorio no tenemos ningún robot con las condiciones de geometría rectangular, con plataforma elevable y movmiento ackermann, por lo tanto el primer paso ha sido modelar el nuevo robot. La herramieta que he utilizado para modelar el robot es Blender y el diseño está basado en el robot logistico de BMW.


El robot simulado:




Video testeando el movimiento de las ruedas:
Betatesting del ejercicio Amazon Warehosue
Por un lado, he actualizado una primera versión de la documentación del ejercicio Amazon Warehouse para el robot de amazon y he estado de beta tester y he visto algunos detalles a mejorar:
- Me sigue dando problemas la importanción de la librería OMPL
- La estantería no gira adecuadamente con el robot, puede que sea porque si el robot no está centrado bien al levantarla alguna de sus patas sigue tocando con el suelo.
- También he visto que la plataforma se incrusta un poco dentro de la estantería.
- Por otro lado, al cambiar de mundo no se actualiza el mapa