Semana 57-58.
En las semanas anteriores se hizo una mini reorganización del ejercicio Amazon Warehouse y como resultado se ha definido el ejercicio en tres fases:
- Planificación euclídea (robot holonómico y puntual)
- Planificación teniendo en cuenta la geometría del robot (robot holonómico)
- Planificación con espacio de control (robot ackermann)
La fase 1 ya está resuelta, por lo que en estas semanas me he centrado en resolver las otras dos fases. En concreto, he completado las siguientes tareas:
- Subir parche del robot ackermann logístico con sus correspondientes launchers al repositorio RoboticsInfrastructure
- Probar la solución de la fase 1 en el RADI 4.4.31
- Grabar un vídeo del “Ackermann logistic robot” diseñado donde se muestre el movimiento de las ruedas y la plataforma
Y tengo parcialmente resuelta la fase 2. En esta fase, hay que resolver el ejercicio en dos partes: una el robot tiene una geometría circular donde la dirección del robot no tiene gran peso, esta parte no es imprescindible ya que se puede utilizar la solución de la fase 1, pero he decidido pasar por aquí para avanzar escalonadamente a la siguiente situación cuando el robot tiene una geometría rectangular (forma de la estantería). A continuación, muestro alguna prueba que he realizado para cuando se trata de una geometría circular.
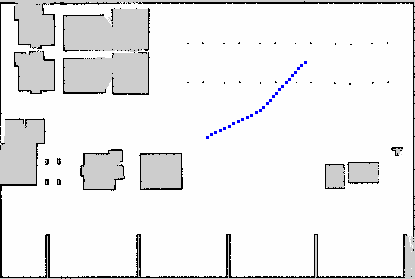
Comparación del proceso de comprobación de la validez del estado de espacio:
- Fase 1

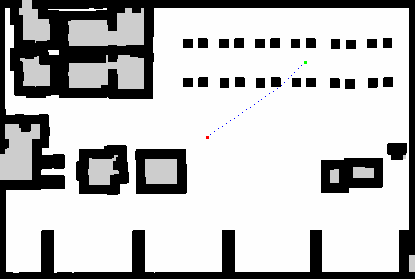
- Fase 2