
Week 21 - Preparación del Entrenamiento con EfficientViT
Preparación del Entrenamiento con EfficientViT
Para mejorar la percepción del carril y su curvatura, se decidió construir un dataset implementando las imágenes segmentadas suministradas por el simulador CARLA como etiquetas de las imágenes RGB en crudo obtenidas. Estas imágenes segmentadas permiten diferenciar los diversos elementos que aparecen en la escena, asignándoles un color propio a cada clase, como peatones, señalización y edificios. Esto nos servirá para distinguir claramente la carretera.
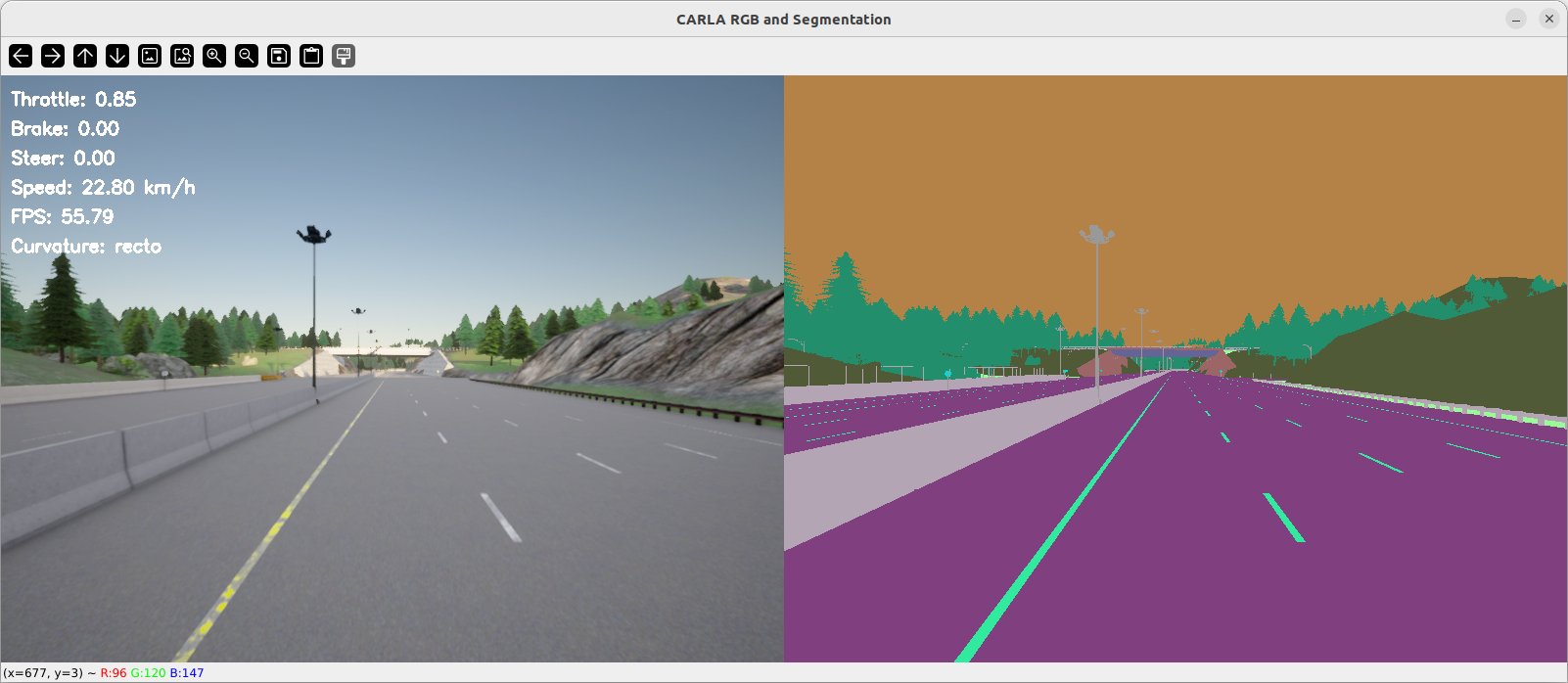
Además, se añadió la etiqueta de curvatura (curvo, recto) con el propósito de mejorar la inferencia en la detección de carriles y contar con un dataset que contemple ambas clases, recta y curva, permitiendo así entrenar a dos expertos para estas categorías.
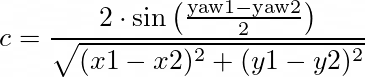
La obtención de la curvatura se realizó utilizando los waypoints obtenidos de la ciudad por la que se navega, calculados a partir de las coordenadas x, y y yaw mediante el método de aproximación circular.
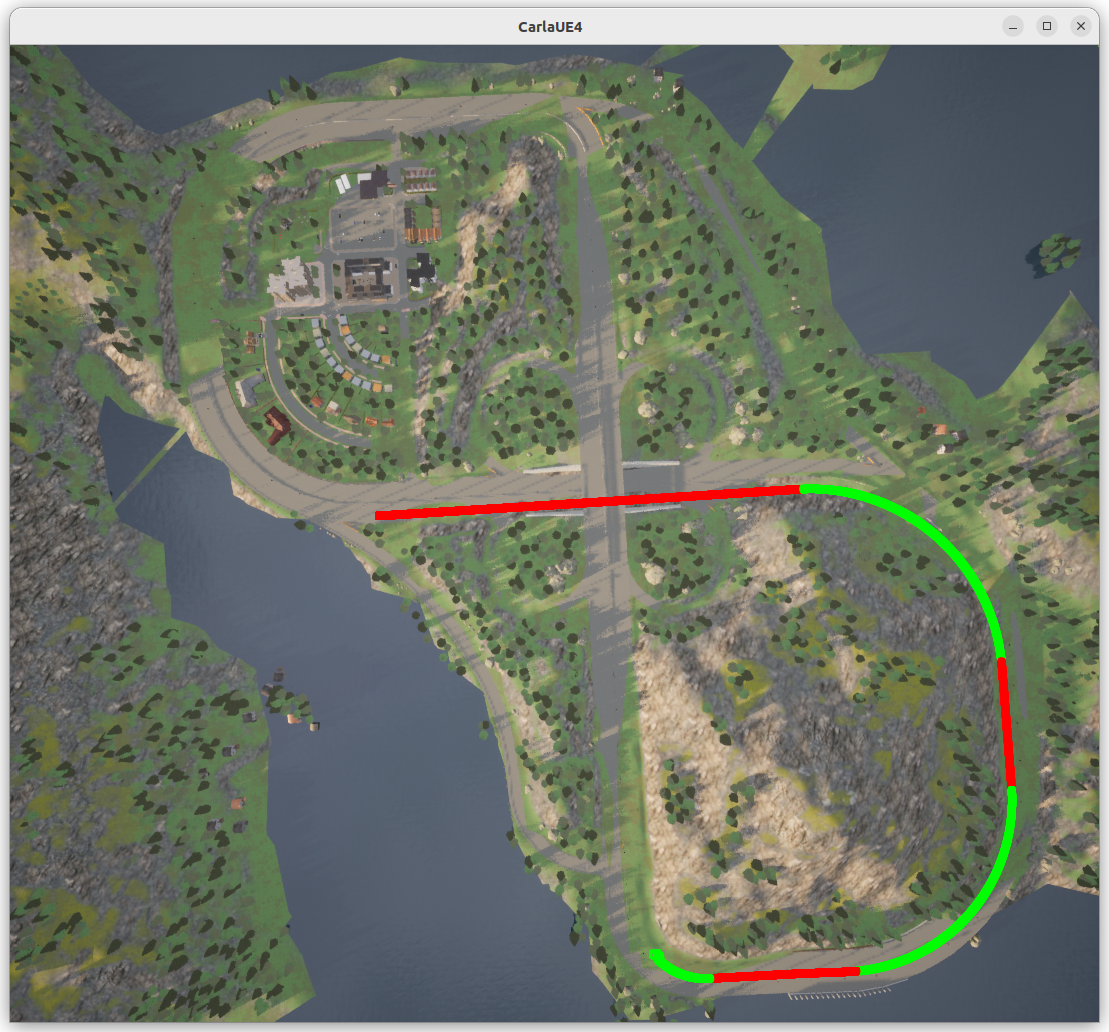
Este método resultó ser más confiable que el anterior empleado. En el gráfico se muestra cómo esta medición concuerda con las líneas graficadas sobre él.
Con este dataset, se pretende a continuación construir un modelo que permita entrenar a los dos expertos a partir de datos que puedan inferir esta información sin necesidad de tomar los datos directamente suministrados por la PythonAPI.