Week 7 - Pruebas del Piloto Automático Seguidor de línea con robot Turtlebot2
Prueba del Turtlebot2
Para entrenar la red CNN PilotNet, se empleó un controlador PID seguidor de línea como experto para regular el ángulo de giro. Este control se basa en el cálculo del error de posición utilizando visión artificial, donde se detecta la línea y el centro de la imagen.
Prueba piloto en sentido contra el reloj
Para la creación del conjunto de datos, se recopilaron 80,000 imágenes etiquetadas con velocidad lineal y angular. Los datos se dividieron en 70% para entrenamiento y 30% para la validación. Se diseñó el dataset utilizando una pista con pocas rectas para evitar problemas de balanceo fuerte, aunque se agregaron datos adicionales para mejorar este equilibrio. Además, se implementó el aumento de datos mediante la biblioteca Albumentations, utilizando funciones como HorizontalFlip, ColorJitter, RandomBrightnessContrast, RandomGamma, HueSaturationValue, FancyPCA y GaussianBlur.
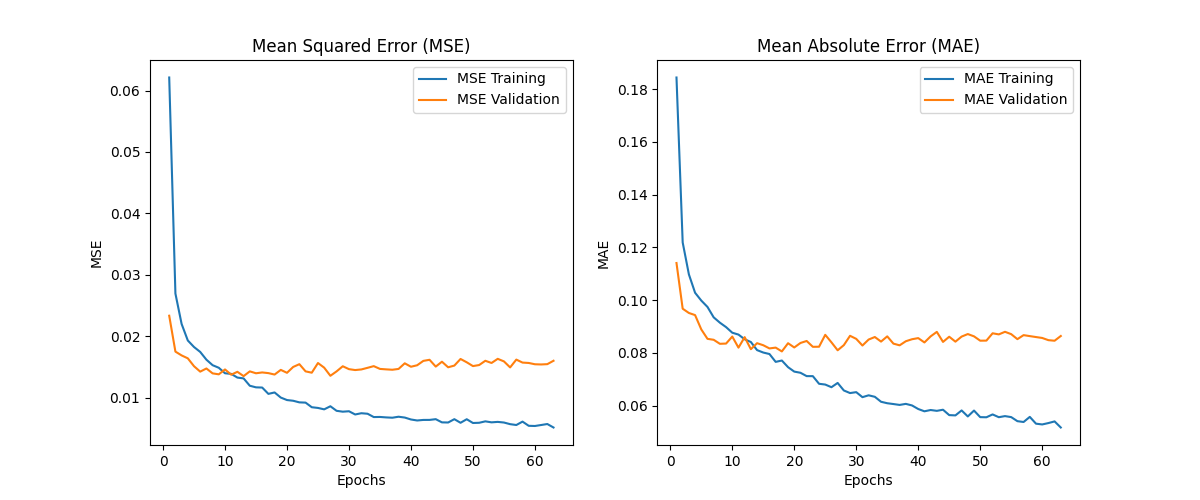
En cuanto al entrenamiento, se utilizó la arquitectura PilotNet durante 63 épocas, empleando la métrica de error cuadrático medio (MSE).
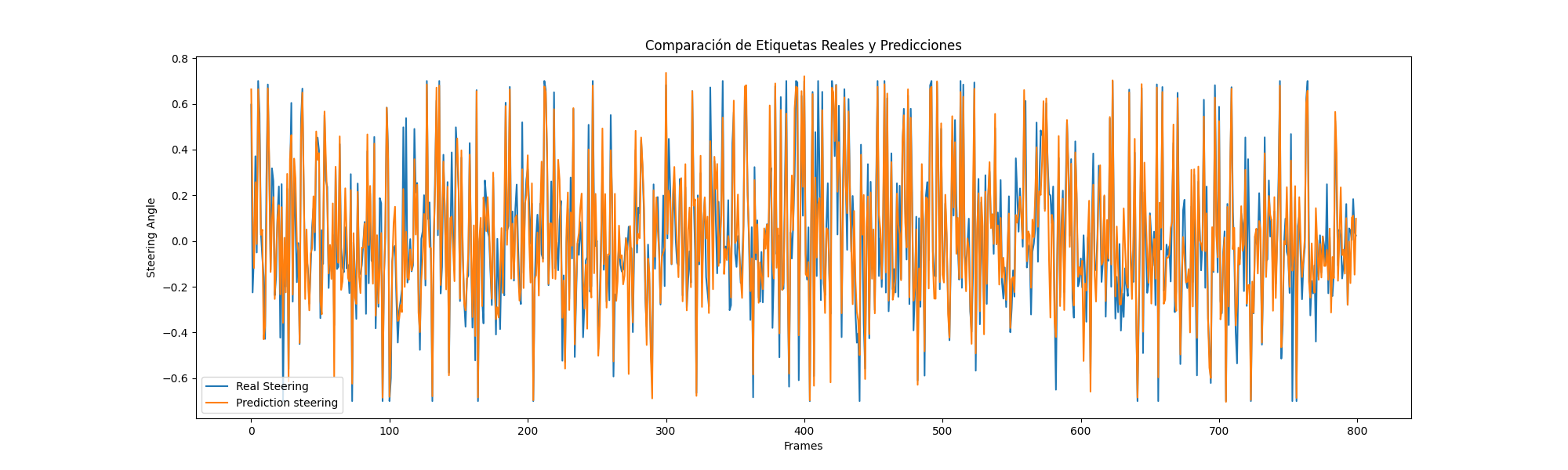
Se realizaron validaciones aleatorias en algunas imágenes y se compararon con las predicciones, obteniendo resultados muy similares.