
Week 14 - Prueba de especialistas
se construyeron datasets especializados: uno para líneas rectas y otro para líneas curvas. Esto permitió el desarrollo de dos modelos expertos en cada tipo de trayectoria. Utilizamos un detector de curvatura para determinar el radio de las curvas y, mediante una condición lógica, seleccionar el modelo adecuado según el caso: el especialista en líneas rectas o el especialista en curvas.
El proceso de entrenamiento incluyó el uso de 45,000 imágenes etiquetadas para el modelo de carriles rectos y 25,000 imágenes para el modelo de carriles curvos.
En la prueba inicial, el valor de “steer” inferido por el modelo no permitía el control adecuado del vehículo, lo que hacía imposible su manejo correcto. Este resultado inicial destacó la necesidad de ajustes adicionales en el modelo y su integración.
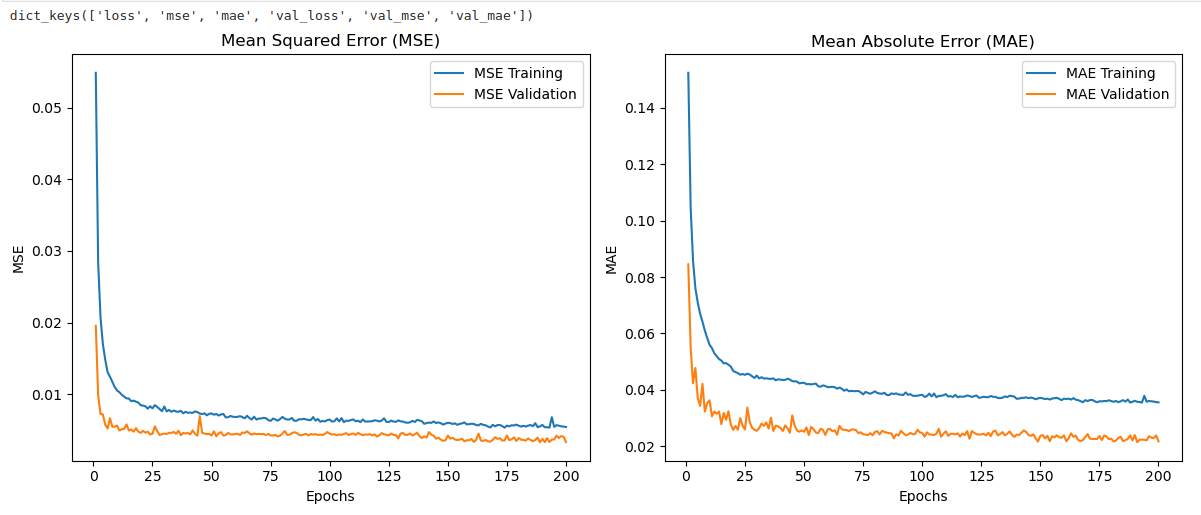
modelo para carril recto
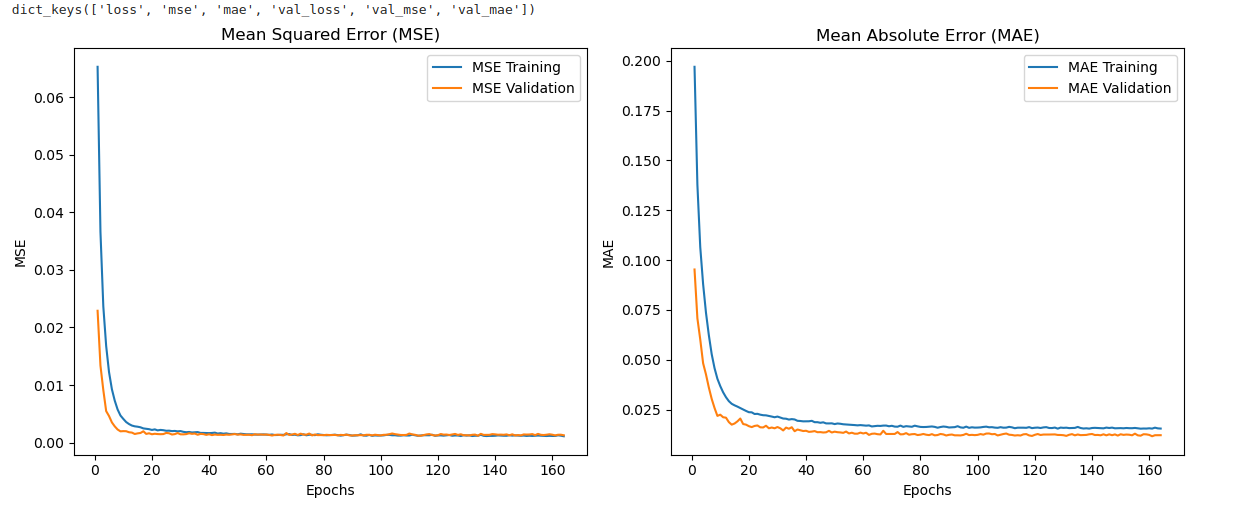
modelo para carril curvo