
Week 15 - Prueba Visual del Detector de Carril
Prueba Visual del Detector de Carril
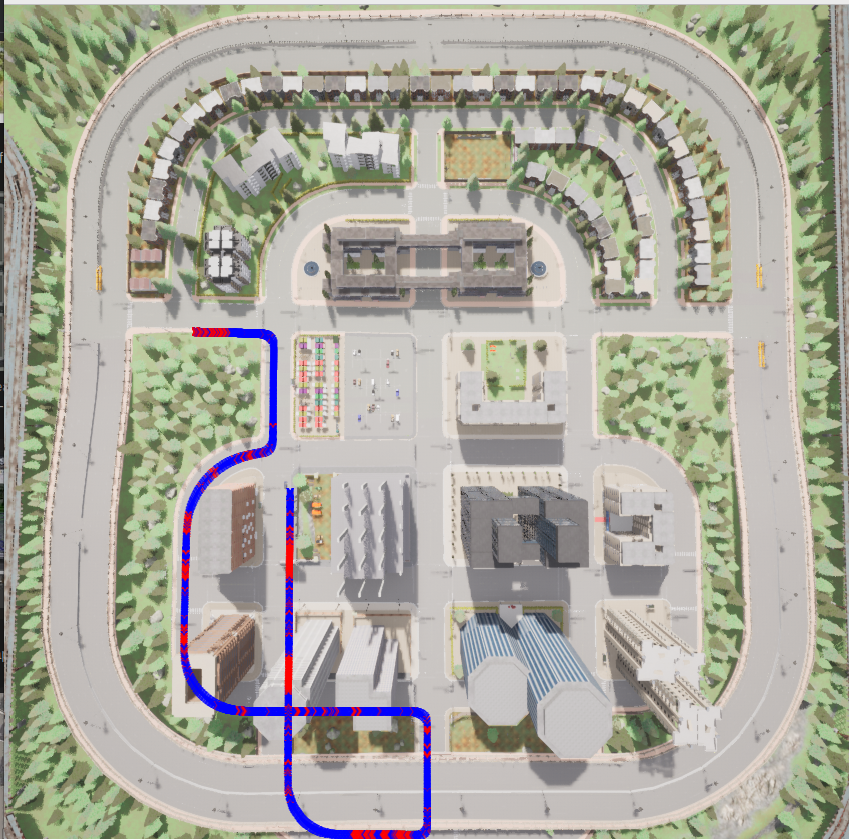
Para determinar el carril y su curvatura, implementamos la PythonAPI de CARLA para obtener los waypoints actuales del vehículo. Utilizamos el método draw_string para visualizar las predicciones de carril en el mapa global, donde se marcan las curvas en rojo y los trayectos rectos en azul.
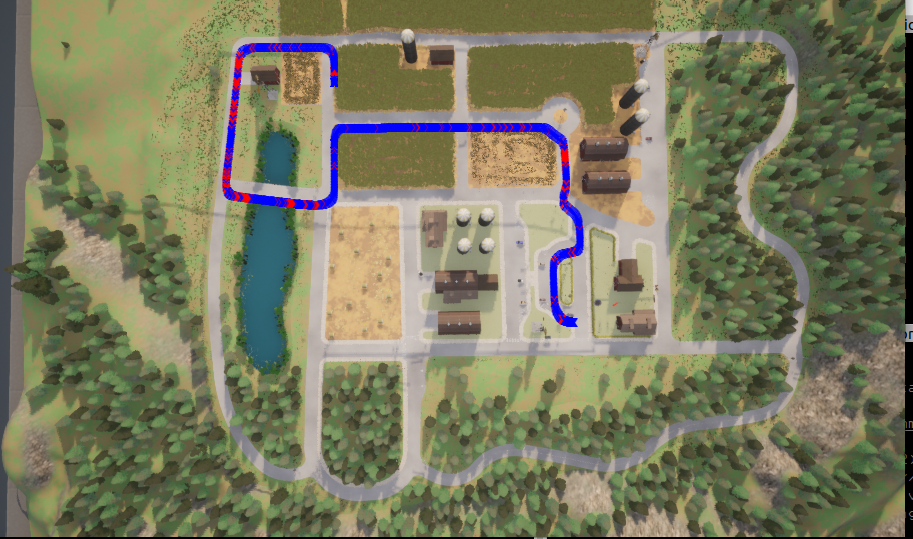
Realizamos pruebas en las ciudades 4, 5, 6 y 7, obteniendo los mejores resultados en la ciudad 4. En las otras ciudades, el modelo tuvo dificultades para predecir las curvas y mostró mucha variabilidad en los tramos rectos, lo que resultó en predicciones imprecisas.
Se probó el predictor de carril calculando la curvatura directamente a partir de las máscaras inferidas, pero esto resultó en mediciones imprecisas debido al tamaño reducido de las máscaras. Para mejorar esto, se intentó un ajuste polinómico sobre las máscaras para encontrar la línea de mejor ajuste y, a partir de estas líneas y las horizontales superpuestas en la imagen, calcular el centro del carril y su curvatura. Sin embargo, este método no mejoró la precisión de la inferencia de curvatura.

Tonw04
Tonw05

Tonw06
Tonw07