
Week 27 - Nuevo Entrenamiento de Expertos en Conducción Autónoma en CARLA
Este experimento se realizó con un dataset completamente renovado, empleando una metodología diferente para su construcción.
La metodología consistió en programar una alternancia entre el piloto automático y un modo “piloto borracho” cada cinco segundos. Este modo simula un comportamiento errático, con el fin de enriquecer el dataset y generar situaciones en las que el vehículo pierde la trayectoria deseada. El objetivo es entrenar un modelo que sea capaz de retomar el control del vehículo cuando se desvíe, mejorando su capacidad de corrección y adaptación.
El dataset resultante consta de 50,000 imágenes que incluyen tanto la vista RGB como la imagen segmentada. De la imagen segmentada se extrajo la información correspondiente a la calzada, que luego fue incorporada como un cuarto canal adicional a la imagen RGB durante el entrenamiento. Además, el dataset incluye etiquetas correspondientes a la dirección del volante (steer), freno (brake) y aceleración (throttle).
Para entrenar los dos expertos, es decir, los modelos especializados en curvas y rectas, se utilizó una estrategia de balanceo y aumento de datos. El learning rate inicial fue de 0.01. El modelo entrenado, aunque sigue mostrando un comportamiento algo torpe, demostró una mejora significativa respecto al modelo anterior, especialmente en su capacidad de retomar la trayectoria luego de desviarse.
La próxima tarea será optimizar los hiperparámetros para lograr un mejor desempeño. El proceso de entrenamiento actual tomó más de 12 horas, lo cual limitó las oportunidades para ajustar los hiperparámetros de manera más eficaz. Mejorar la eficiencia del entrenamiento y ajustar adecuadamente los hiperparámetros es clave para el próximo paso de este proyecto.
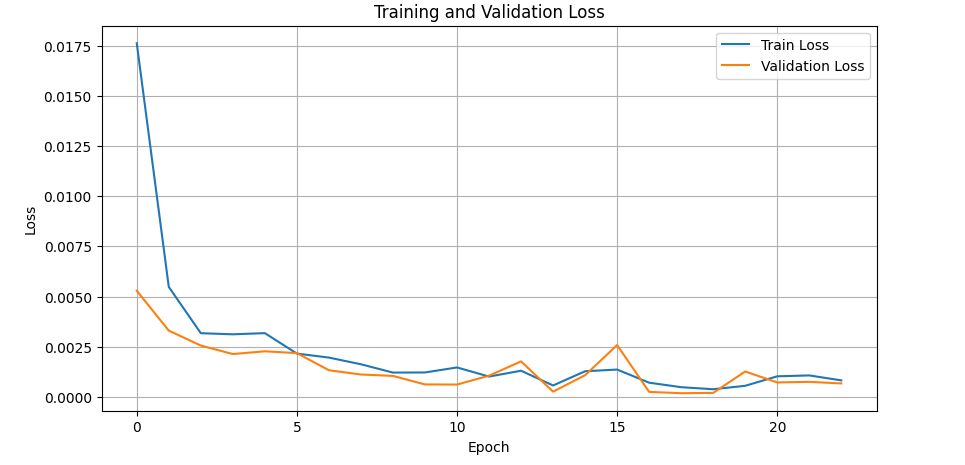
Entrenamiento experto en recta
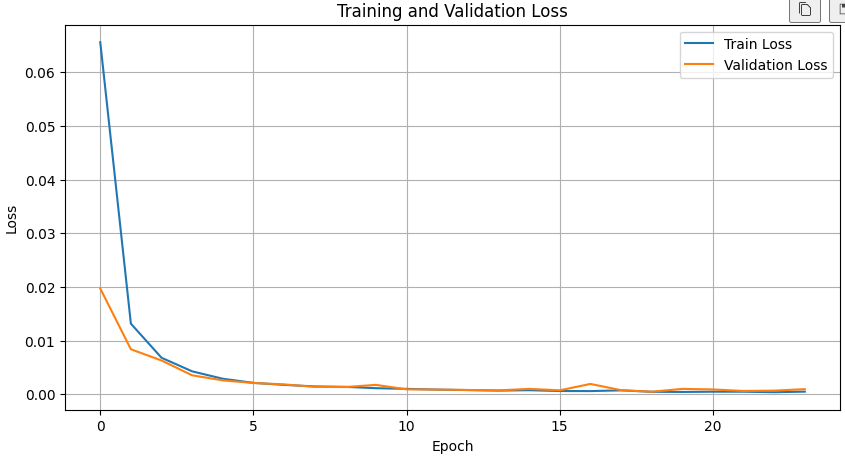
Entrenamiento experto en curva
Video de prueba