
Week 37 - Entrenamiento del modelo modifiedDeepestLSTM
Prueba del Modelo Monolítico con PyTorch
En este experimento se evaluó el rendimiento de un modelo monolítico para conducción autónoma, implementado en PyTorch. El modelo se entrenó utilizando el dataset DAgger40, en el que las entradas corresponden a la máscara de calzada extraída de imágenes segmentadas (de tamaño 3 × 66 × 200) y las salidas son los valores de steer y throttle. Para mejorar la robustez del modelo, se aplicaron técnicas de balanceo y aumento de datos (transformaciones).
Parámetros de Entrenamiento
Se establecieron los siguientes parámetros iniciales:
| Parámetro | Valor |
|---|---|
| Batch Size | 8 |
| Learning Rate | 0.00005 |
| Épocas Máximas | 80 |
| Tamaño de Input | (66, 200, 3) |
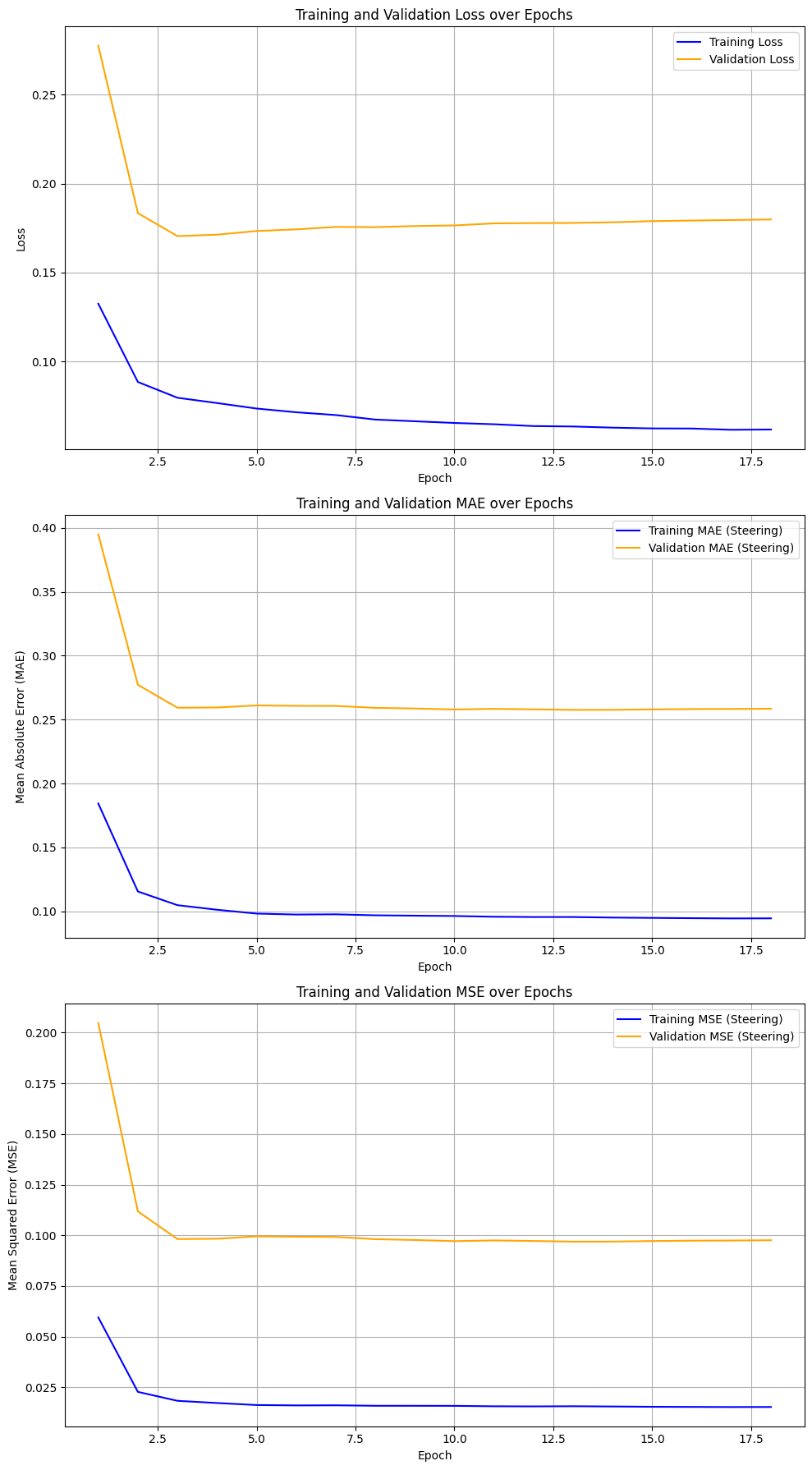
Nota: Aunque se configuraron 80 épocas, el entrenamiento se detuvo en 18 épocas gracias al mecanismo de early stopping.
Entrenamiento y validación
Desempeño del Modelo
El modelo mostró un desempeño robusto en condiciones de rectas y curvas; es capaz de recuperar el control cuando el vehículo se sale del carril. Sin embargo, se observaron problemas en algunas intersecciones, donde el control se pierde momentáneamente.
Tabla Resumen de Resultados
| Escenario | Descripción | Observaciones |
|---|---|---|
| Rectas | Pruebas en condiciones de vías rectas | Buen desempeño, respuesta rápida |
| Curvas | Pruebas en trayectorias con curvatura moderada | Manejo adecuado de la dirección |
| Intersecciones | Pruebas en cruces e intersecciones | Dificultades para mantener el control |
Videos de Pruebas en Simulador
Se realizaron pruebas en dos entornos diferentes para validar la generalización del modelo:
Town01
Town02
Estos videos muestran el desempeño del modelo en distintos escenarios urbanos, evidenciando su capacidad para recuperarse del error de carril y adaptarse a condiciones cambiantes.
Futuras Mejoras
Para mejorar la generalización y la robustez del modelo, se planea modificar algunos parámetros en futuros experimentos:
Ajuste del Early Stopping: Se optimizará el criterio para evitar detener el entrenamiento prematuramente y lograr una mayor estabilidad. Modificación del Learning Rate: Se evaluarán diferentes estrategias de tasa de aprendizaje para mejorar la convergencia y adaptabilidad del modelo.
Entrenamiento con cambio de parámetros
| Parámetro | Valor |
|---|---|
| Batch Size | 32 |
| Learning Rate | 0.0001 |
| Épocas Máximas | 80 |
| Tamaño de Input | (66, 200, 3) |
El modelo muestra mayor robustez en intersecciones y se recentra con más facilidad en la calzada, aunque aún puede perder el control en situaciones puntuales. Se prevén pruebas en un entorno más controlado, donde se espera que estas inestabilidades no se presenten, aunque dichas pruebas aún no se han llevado a cabo.