Week 43 - BehaviorMetrics - Lectura de ROSBAG ROS2
Esta semana avanzamos en la ampliación del script analyze_bag.py para que, además de procesar ‘bags’ de ROS 1, sea capaz de leer y deserializar automáticamente las ROS 2 bags generadas en CARLA. Para ello:
- Integramos la biblioteca rosbag2_py y creamos un mecanismo de mapeo tópico→tipo de mensaje, lo que nos permite extraer cualquier tópico disponible sin depender de YAML manual.
- Implementamos funciones dedicadas
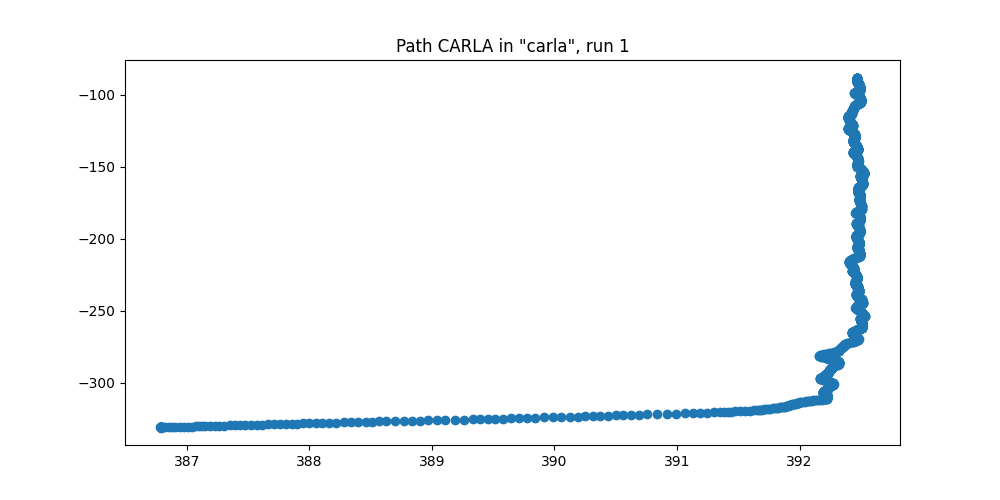
read_ros2(...)yprocess_bag_msgs_ros2(...)que recorren la carpeta.bag/, deserializan cada mensaje y extraen los campos necesarios. - Validamos la nueva lógica generando un gráfico “path_followed” (“trayectoria seguida”), que muestra en un diagrama de dispersión (scatter plot) la ruta completa de cada ejecución. El resultado es un único gráfico claro y legible, integrado en nuestro directorio de análisis.
Próximos pasos
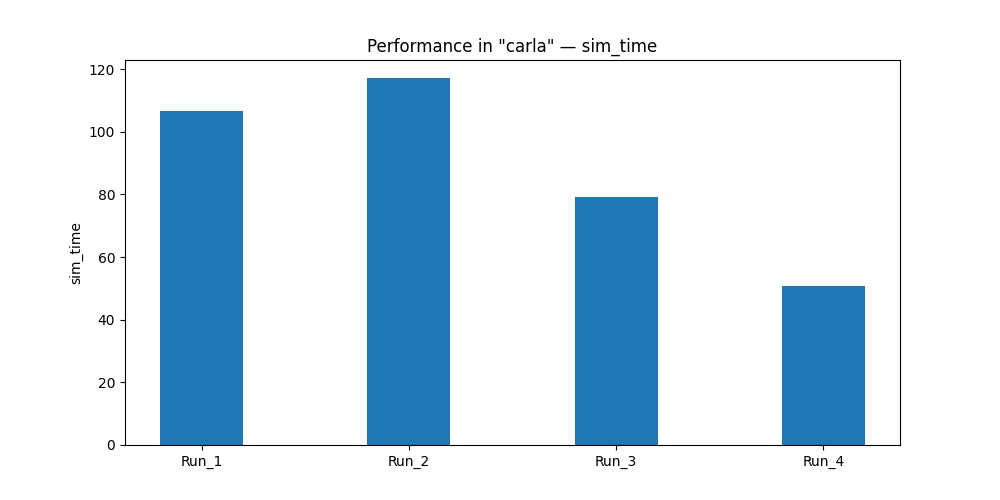
- Incorporar más métricas escalares (velocidad media, tiempo simulado, número de colisiones…) y generar sus correspondientes gráficas de barras.
Lectura Simultánea de múltiples bags
- Soporte para procesar múltiples bags de ROS 1 y ROS 2 en un solo análisis.
-
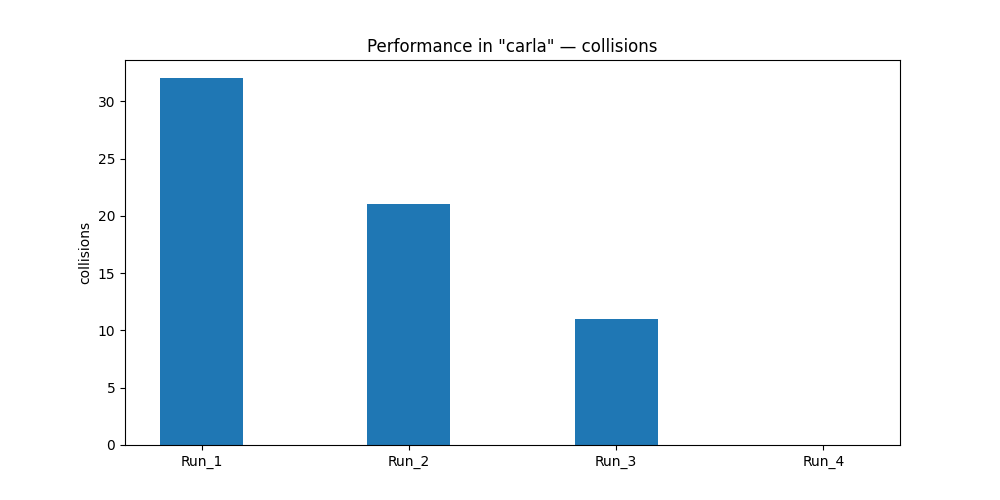
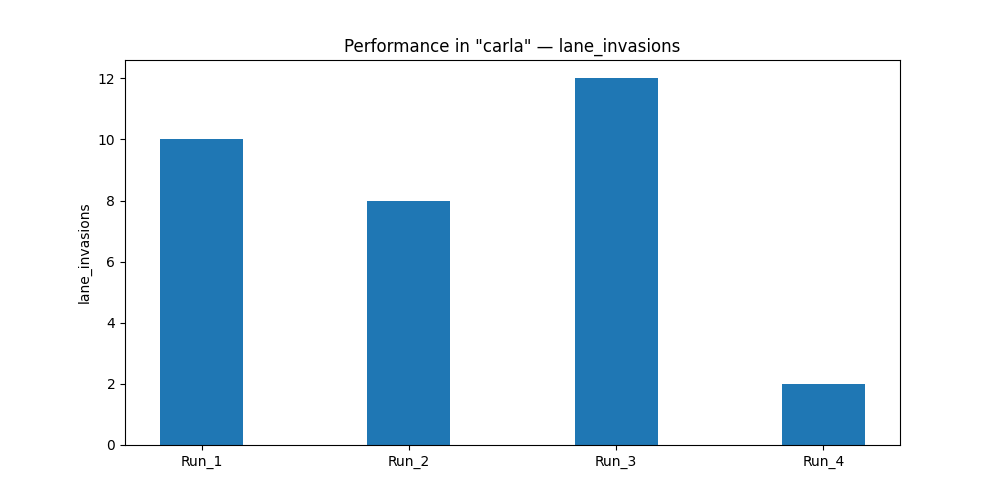
Generación automática de gráficos de rendimiento para cada ejecución:
- average_speed
- collisions
- lane_ivasions - sim time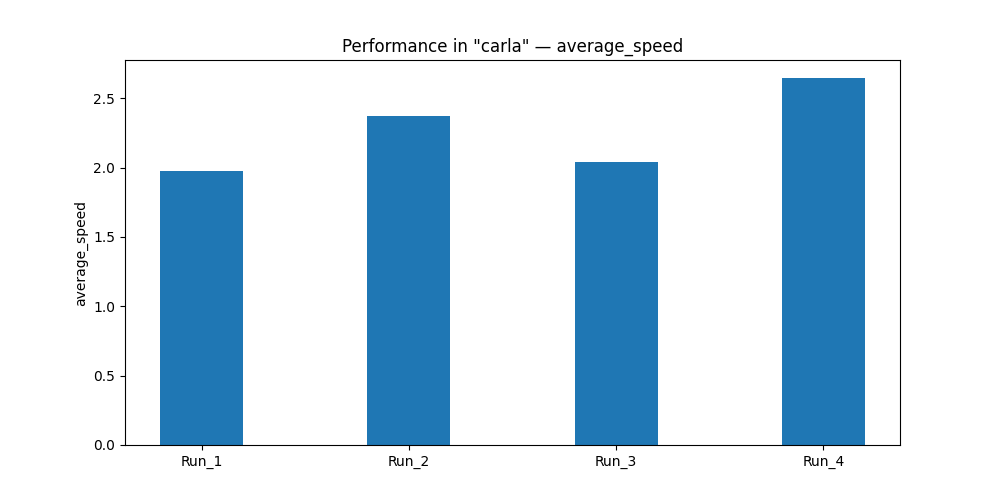
average_speed
</figure>