Week 45- BehaviorMetrics - Lectura de ROSBAG ROS2 - Métricas espaciales
Registro y Análisis de Métricas de Simulación
Una vez finalizado el experimento en CARLA, se recuperan métricas espaciales y de eventos directamente desde los datos grabados en ROS 2 (.db3). El sistema genera dos archivos clave:
-
Archivo .json con todas las métricas cuantitativas del recorrido, incluyendo distancia recorrida, velocidad promedio, número de colisiones, invasiones de carril y variaciones bruscas en los comandos de control.
-
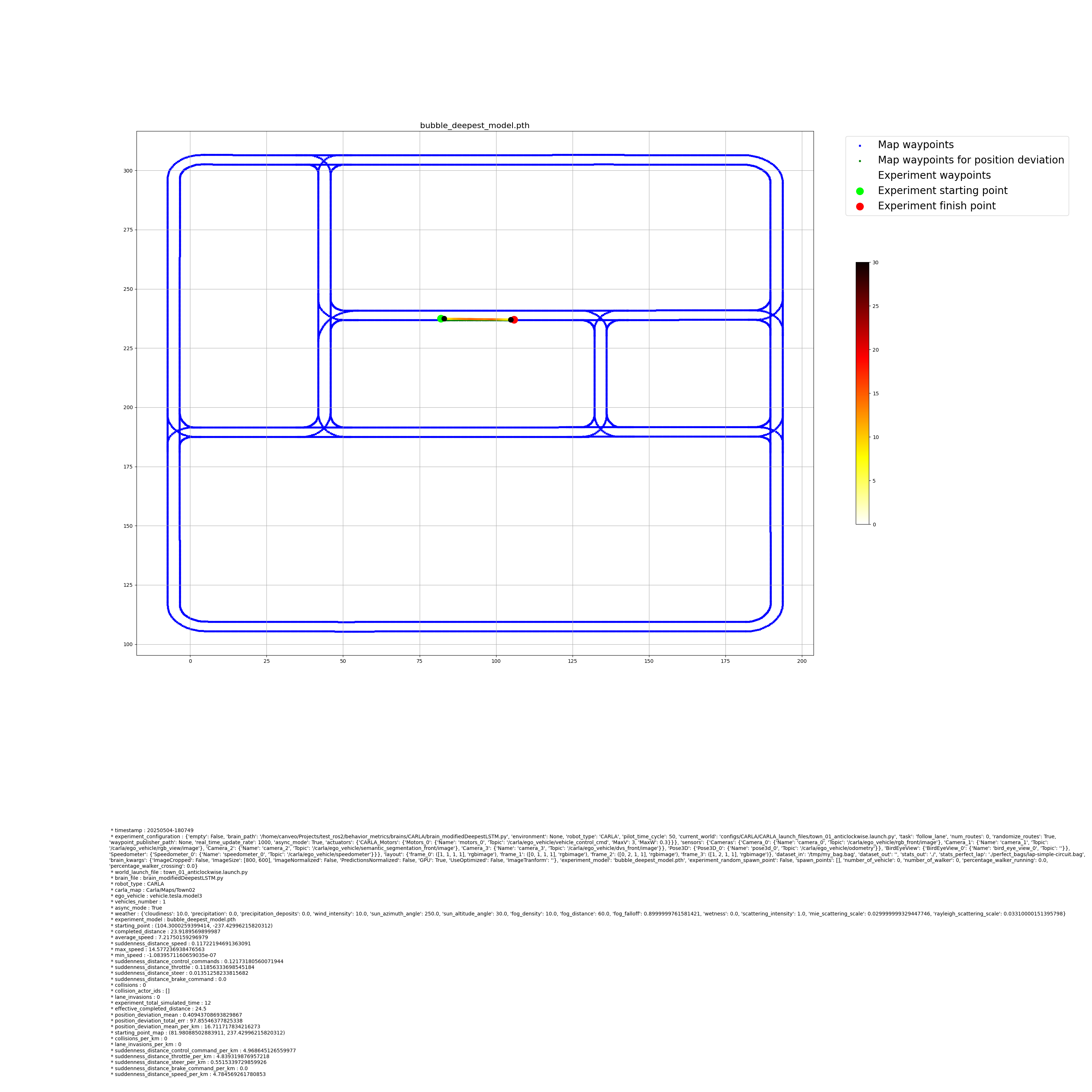
Imagen .png que visualiza el recorrido realizado por el vehículo en el mapa, comparado con los waypoints ideales, indicando los puntos de inicio, fin, y cualquier evento relevante (colisiones o invasiones de carril si los hubiera).
Estas métricas son producidas automáticamente justo después de pausar la grabación del rosbag, y se generan desde el script controller_carla.py durante la ejecución de la simulación.
Actualmente se evalúa si esta generación en línea (online) es suficiente o si es necesario implementar un análisis completamente offline a través del script analyze_bag.py. Esto permitiría:
Asegurar reproducibilidad y depuración posterior sin necesidad de relanzar la simulación.
Revisar bags históricos desde experimentos pasados.
Realizar análisis comparativos o masivos sin reejecutar CARLA.
Ambas opciones tienen ventajas: el análisis online facilita automatización inmediata, mientras que el enfoque offline brinda flexibilidad y escalabilidad en análisis posteriores.