Week 48 - Prubea inicial conn modelo ResNet18 y BehaviorMetrics
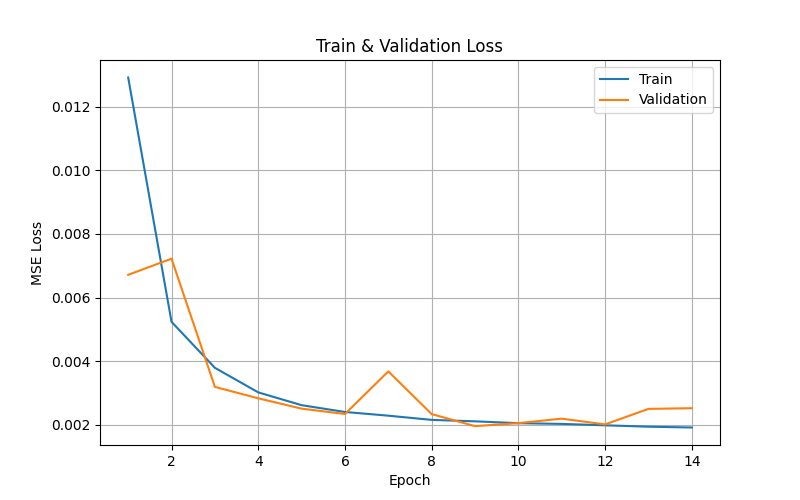
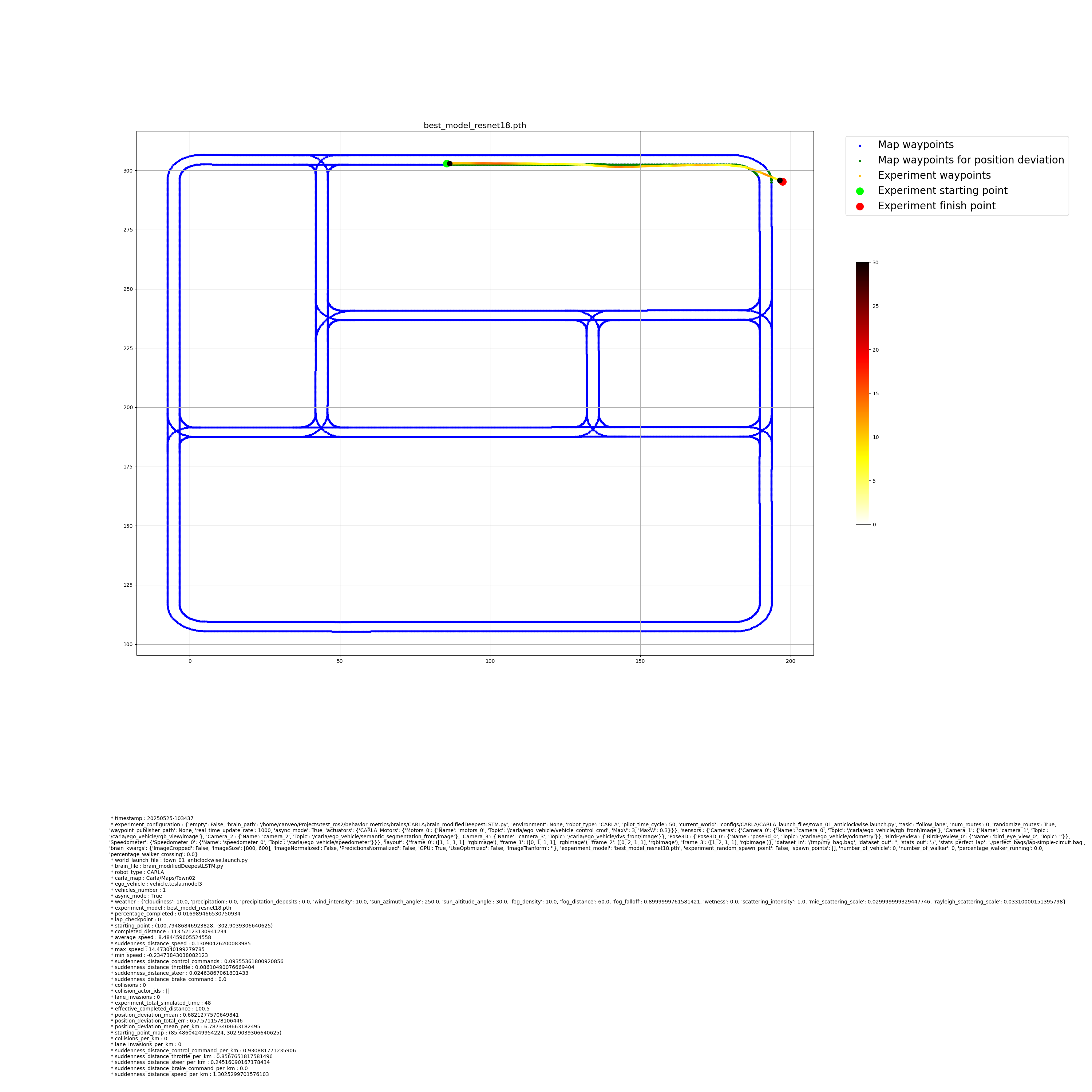
En esta primera prueba con ResNet18, el modelo fue capaz de aprender una política básica de seguimiento de carril. Sin embargo, durante la simulación en tiempo real, el vehículo se movió lentamente y terminó colisionando. Esto sugiere que es necesario ajustar los hiperparámetros, especialmente en la predicción de throttle, y explorar mejoras en la arquitectura o el preprocesamiento para futuros entrenamientos.
| Parámetro | Valor |
|---|---|
csv_path |
./dataset_dagger/balanced_data.csv |
batch_size |
64 |
epochs |
30 |
lr |
0.0001 |
val_split |
0.1 |
num_workers |
8 |
patience |
5 |
timestamp |
exp_20250524_1746 |
train_transforms |
Affine, Perspective, MotionBlur, GaussianBlur, GaussNoise, BrightnessContrast, HueSaturationValue, ElasticTransform |
val_transforms |
ToTensorV2 only |