Comparación de modelos: EfficientNet V2 S vs ResNet18
| Métrica |
EfficientNet V2 S |
ResNet18 |
| Arquitectura |
EfficientNet V2 S |
ResNet18 |
| Dataset |
balanced_data_70.csv |
balanced_data_70.csv |
| Batch size |
8 |
64 |
| Épocas |
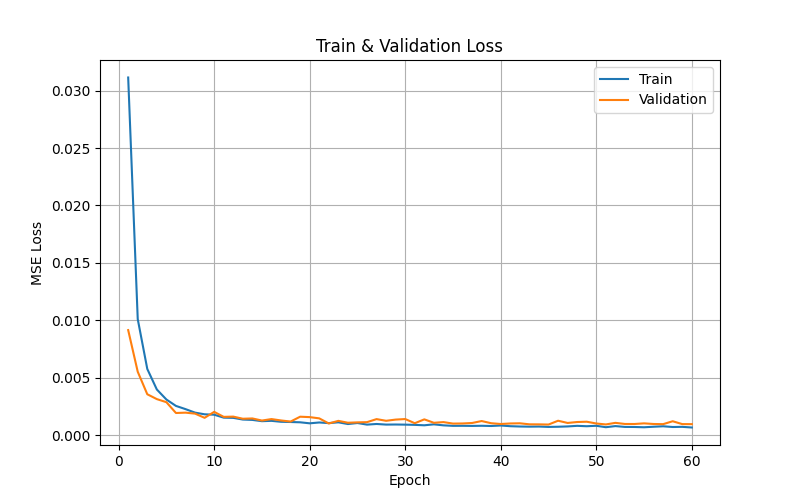
61 (early stop) |
100 |
| División Train/Val |
80% / 20% |
80% / 20% |
| MSE final (val) |
~0.0010 |
~0.0007 |
| Resolución entrada |
(640, 240) |
(640, 240) |
| Número de parámetros |
~21M |
~11M |
| EfficientNet V2 S |
ResNet18 |
 |
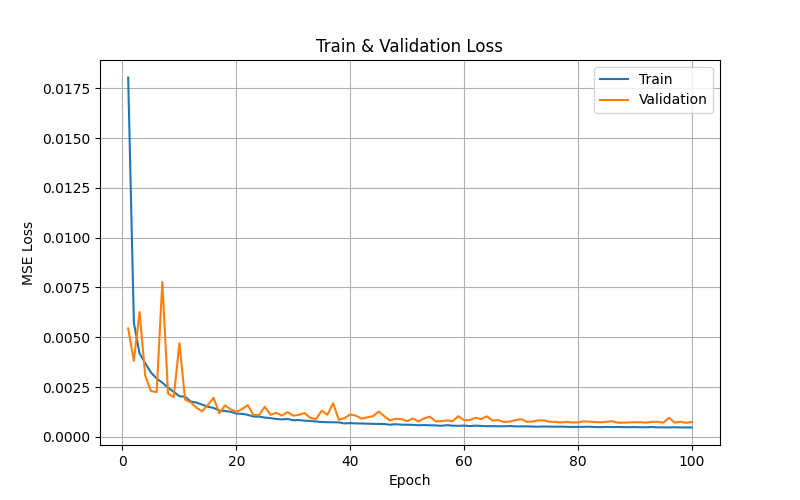 |
Ambos modelos fueron entrenados con imágenes segmentadas y transformaciones visuales avanzadas para aumentar la robustez ante condiciones variadas del entorno.
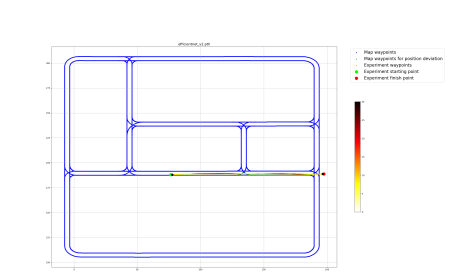
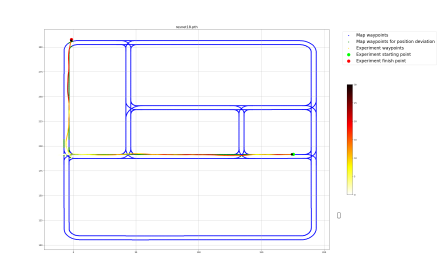
Comparativa de desempeño en simulación (Métricas con BehaviorMetrics)
-
ResNet18 logró recorrer mayor distancia y mantener el vehículo en movimiento de forma estable durante más tiempo. Esto indica mejor cobertura de la trayectoria, aunque con mayor error acumulado en posición.
-
EfficientNet V2 S, por su parte, mostró una mejor precisión posicional promedio, lo que sugiere un control más centrado, pero con posibles dificultades para mantener el movimiento fluido durante trayectorias prolongadas.
-
En términos de suavidad de control (suddenness), ambos modelos mantienen comandos razonablemente suaves, aunque EfficientNet V2 S tiene una mejor respuesta en steer, mientras que ResNet18 lo hace mejor en throttle.
| Métrica |
EfficientNet V2 S |
ResNet18 |
| Distancia recorrida total |
121.06 m |
323.95 m |
| Distancia efectiva recorrida |
32.5 m |
278.0 m |
| Velocidad promedio |
9.69 km/h |
9.94 km/h |
| Tiempo real del experimento |
126.8 s |
253.1 s |
| Desviación media de posición |
1.22 m |
0.68 m |
| Error total de posición |
1106.97 |
1465.19 |
| Colisiones / Invasiones de carril |
0 / 0 |
0 / 0 |
| Suavidad de comandos (throttle) |
0.1325 |
0.1021 |
| Suavidad de comandos (steer) |
0.0115 |
0.0210 |
| EfficientNet V2 S |
ResNet18 |
 |
 |
Comparación de desempeño offline: EfficientNet V2 S vs ResNet18
| Métrica |
EfficientNet V2 S |
ResNet18 |
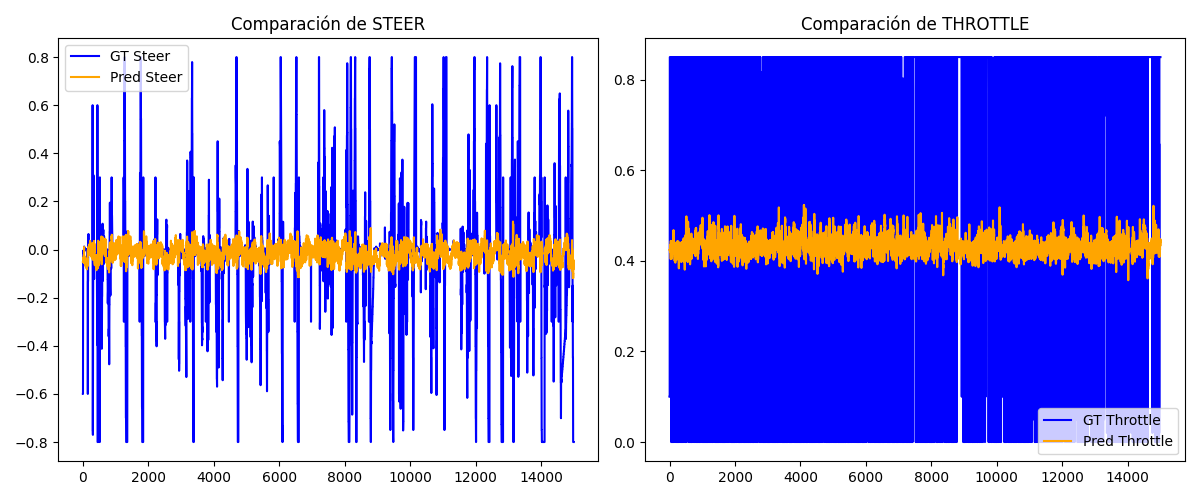
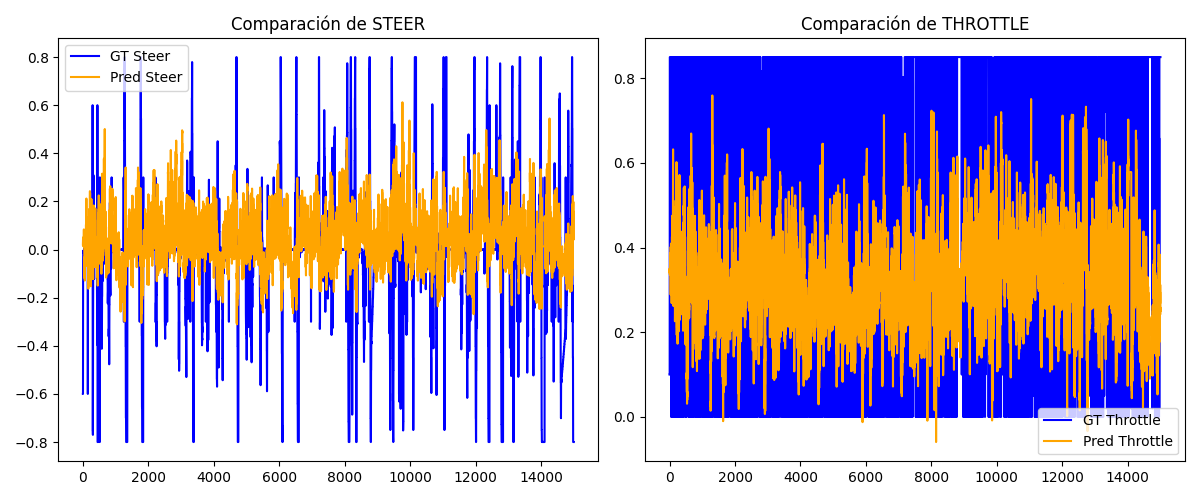
| Error absoluto promedio (steer) |
0.1402 |
0.1907 |
| Error absoluto promedio (throttle) |
0.3979 |
0.4252 |
Comparación visual de predicciones offline
| EfficientNet V2 S |
ResNet18 |
 |
 |
