Week 50 - Entrenamiento Resnet18 y PilotNet
Comparativa de PilotNet y ResNet18 con Dataset Balanceado
Se entrenaron dos modelos de control para conducción autónoma, PilotNet y ResNet18, utilizando un dataset balanceado en los extremos de steer (dirección) y throttle (aceleración). El objetivo fue mejorar la capacidad de generalización en situaciones críticas como curvas cerradas o cambios bruscos de velocidad.
Resultados
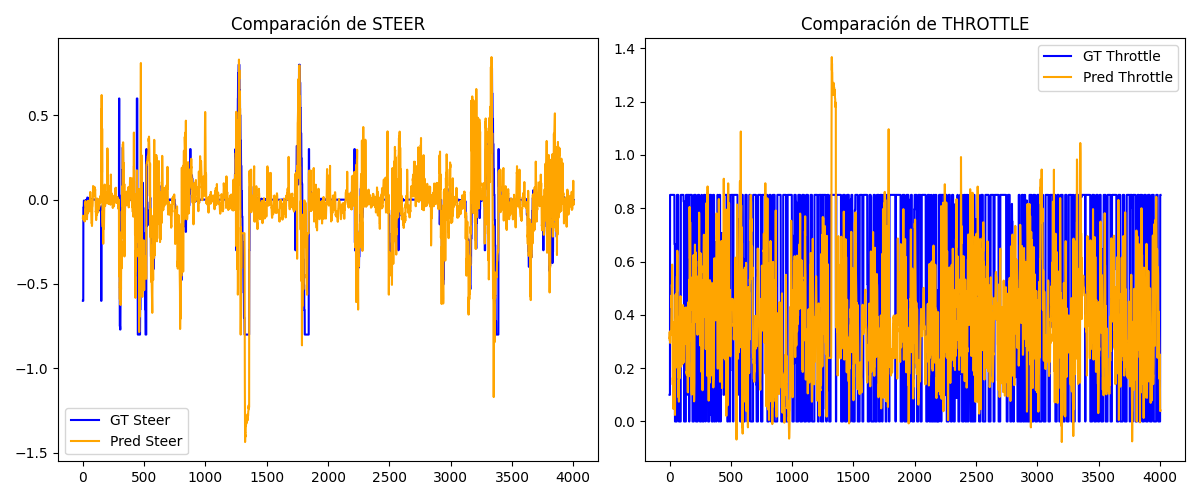
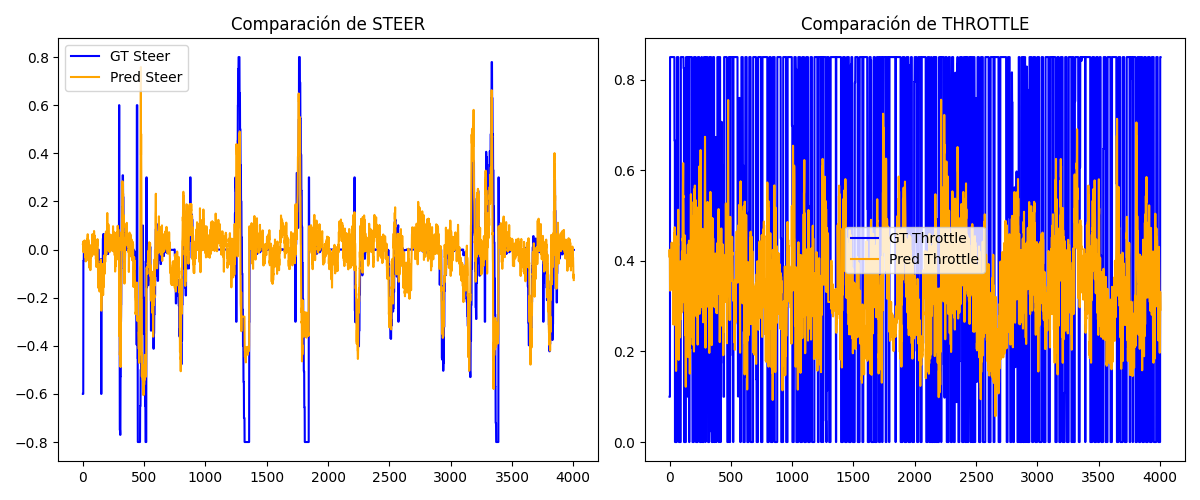
- Steer: ambos modelos muestran mejoras notables en la predicción del ángulo de dirección, especialmente en curvas.
- Throttle: persiste una alta variabilidad; la señal de aceleración predicha tiende a ser menos estable, con mayor ruido.
Visualización de resultados:
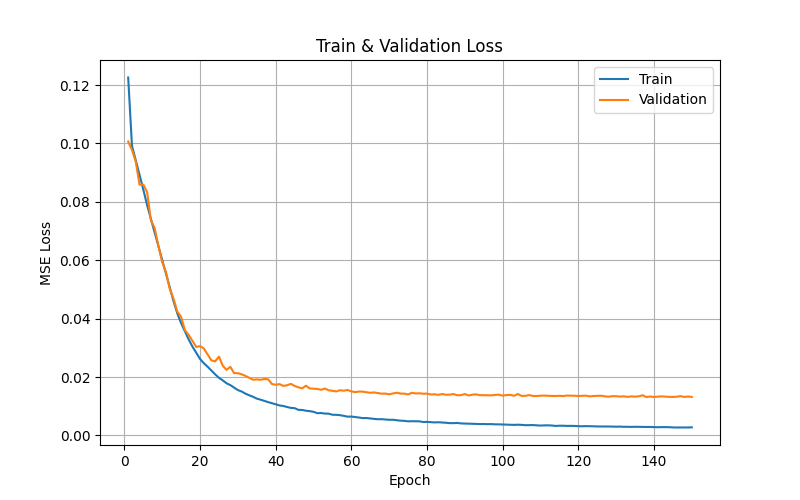
- Las primeras dos gráficas corresponden a PilotNet.
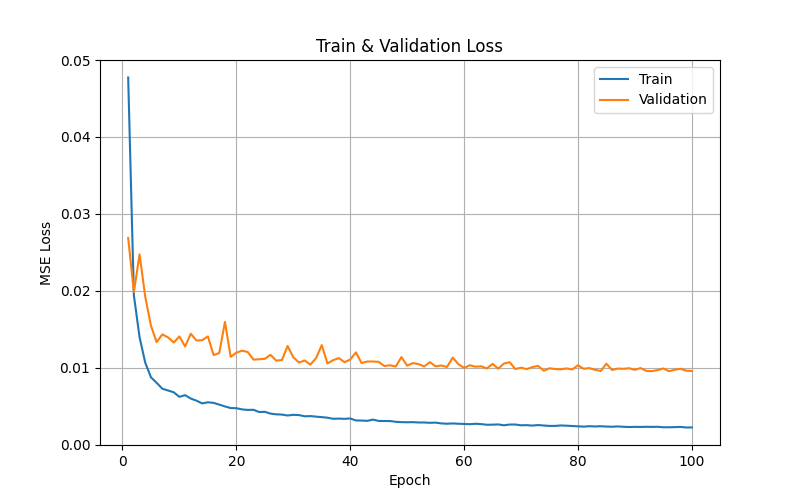
- Las dos siguientes muestran el desempeño de ResNet18.
Curvas de pérdida (MSE):
- Ambos modelos convergen adecuadamente durante el entrenamiento.
- La pérdida de validación se estabiliza después de la época 20, indicando que no hay sobreajuste significativo.