Muy estable. Navega siempre por el carril derecho. Predicciones conservadoras.
ResNet18
Completa el circuito, pero varía entre carril derecho e izquierdo. Toma más giros.
EfficientNet
Con el mejor modelo (epoch_67), navega de forma estable por el carril derecho. Velocidad promedio 24 km/h, hasta 35 km/h en rectas.
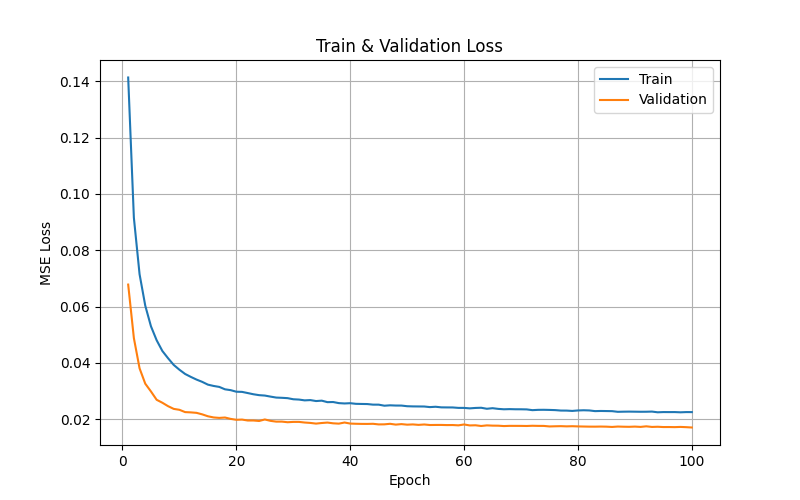
Nota: Aunque inicialmente parecía que EfficientNet fallaba, usando un modelo guardado en la época 67 (val_loss=0.0176) el comportamiento cambió por completo. Ahora se desplaza de forma fluida, siempre por el carril derecho, con una velocidad media de 24 km/h (alcanzando hasta 35 km/h en rectas). Vale la pena revisar modelos intermedios durante el entrenamiento.
Métricas (MSE y MAE)
Resultados de Evaluación Offline por Arquitectura
Modelo
Steer MSE
Steer MAE
Throttle MSE
Throttle MAE
EfficientNet
0.0478
0.1124
0.1966
0.3997
ResNet18
0.0544
0.1465
0.1879
0.4017
PilotNet
0.0133
0.0633
0.1754
0.4032
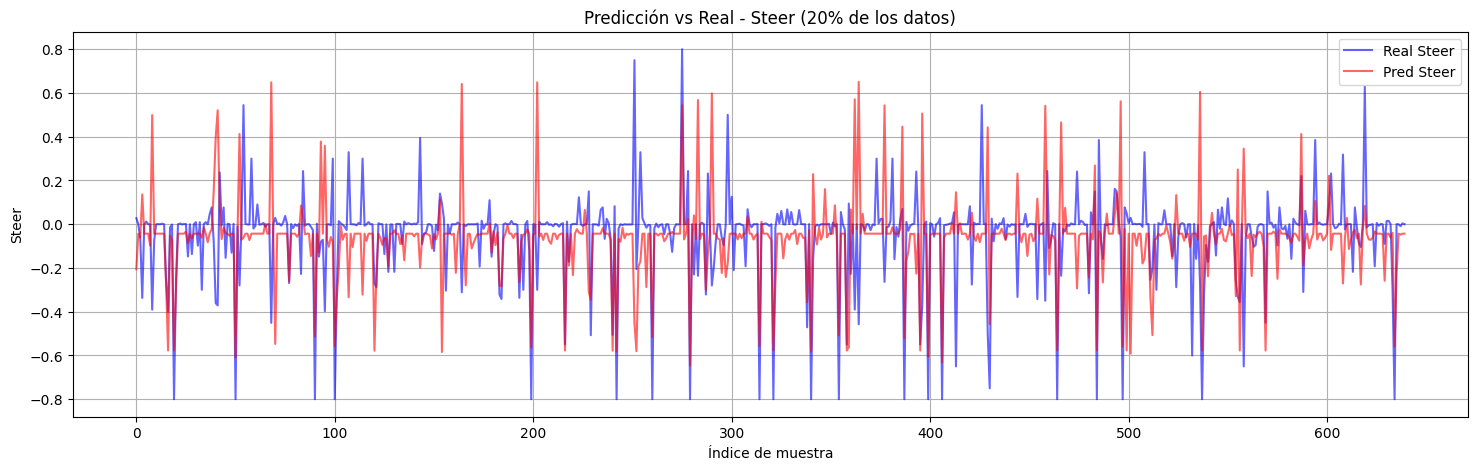
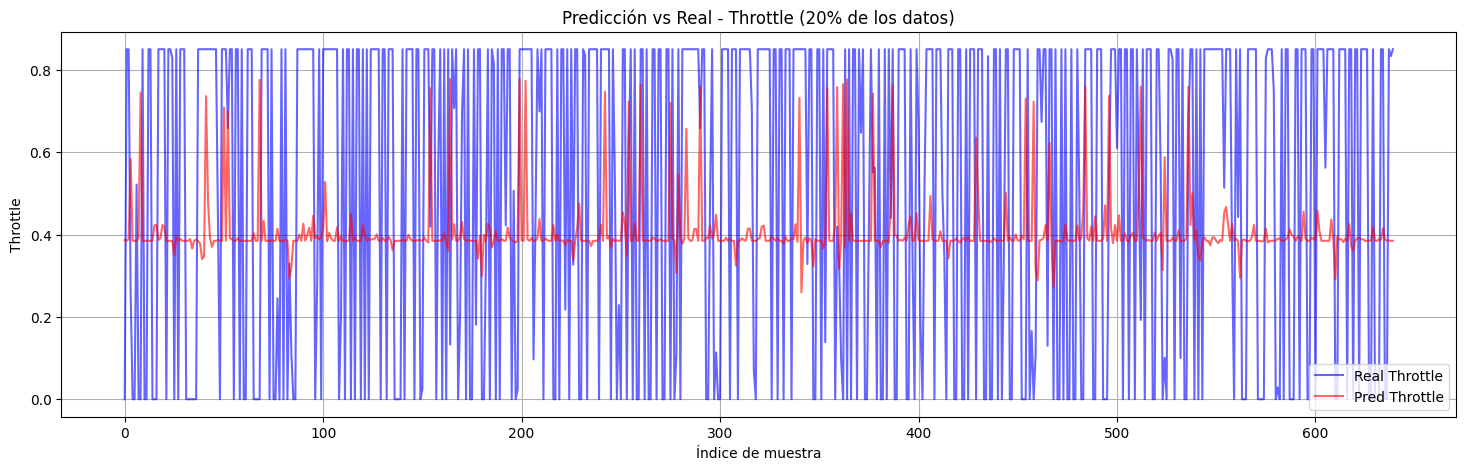
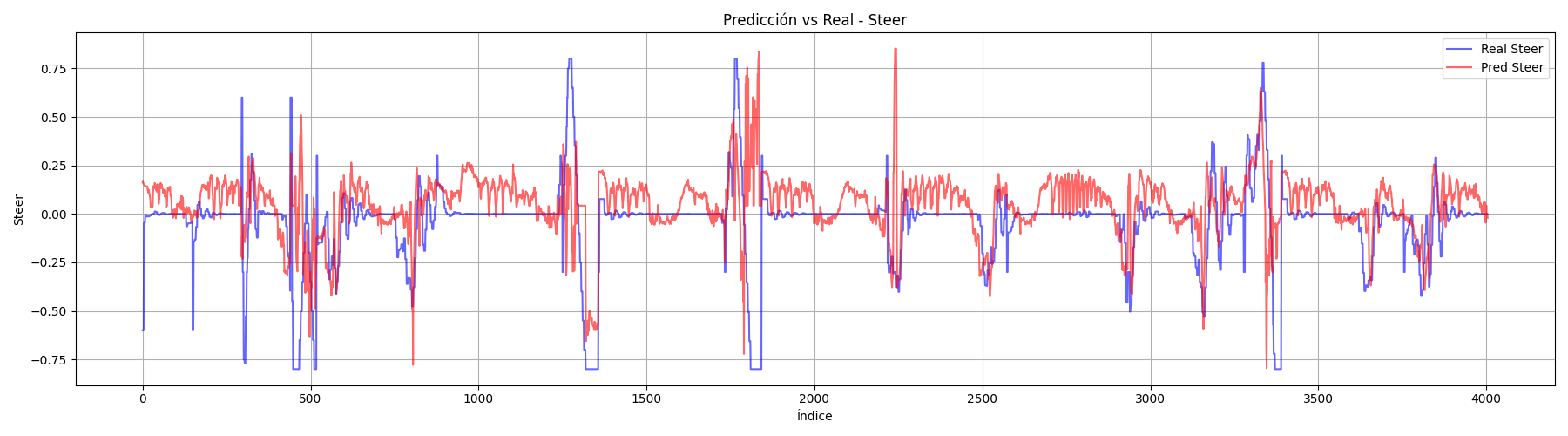
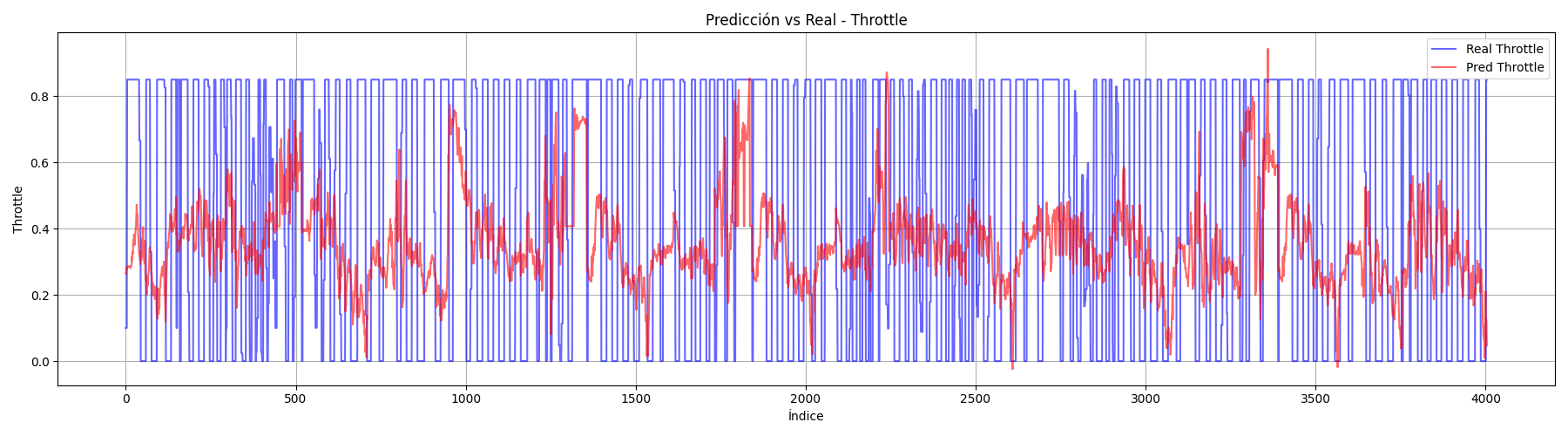
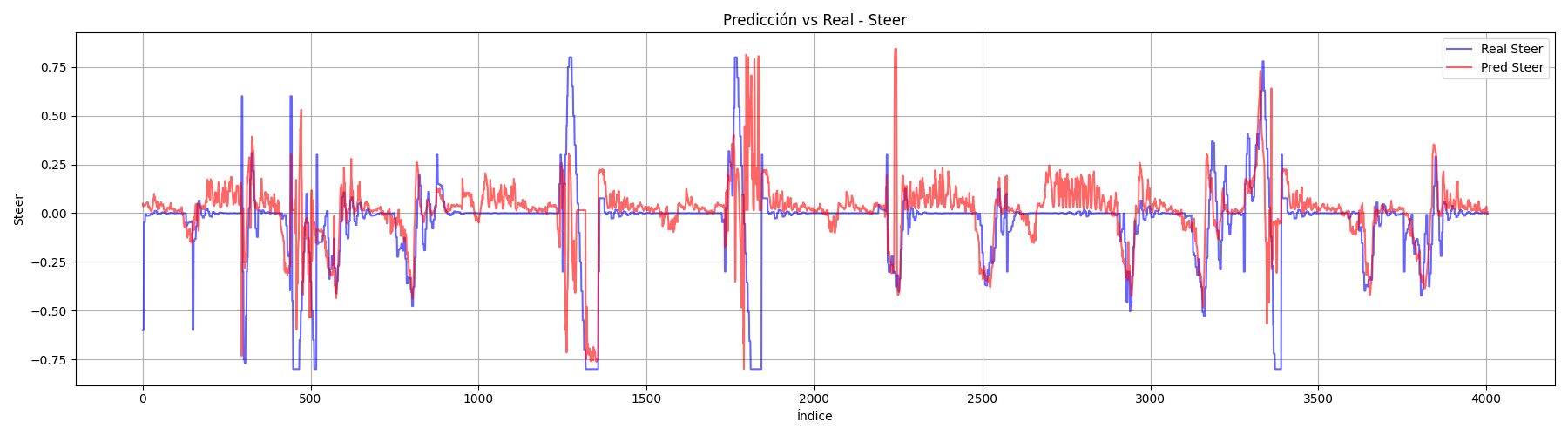
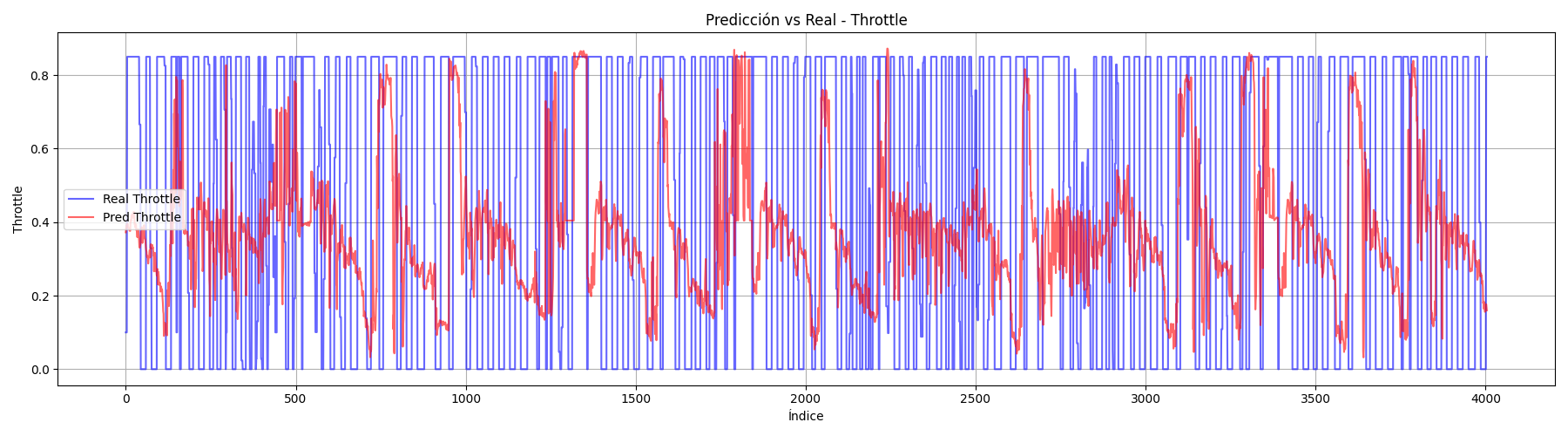
Gráficos de Predicciones vs Reales
Predicción vs Real - Steer (PilotNet)Predicción vs Real - Throttle (PilotNet)Predicción vs Real - Steer (ResNet18)Predicción vs Real - Throttle (ResNet18)Predicción vs Real - Steer (EfficientNet)Predicción vs Real - Throttle (EfficientNet)
Affine, ColorJitter, Perspective, RandomShadow, Rain, Blur, Noise, Dropout, etc.
Sin aumentos
15
Entrenamiento en TensorFlow
ResNet18
256
100
2.5e-5
Affine, ColorJitter, Perspective, RandomShadow, Rain, Blur, Noise, Dropout, etc.
Sin aumentos
15
Entrenado con PyTorch
EfficientNetV2-S
128
100
2.5e-5
Affine, ColorJitter, Perspective, RandomShadow, Rain, Blur, Noise, Dropout, etc.
Sin aumentos
15
Entrenado con PyTorch
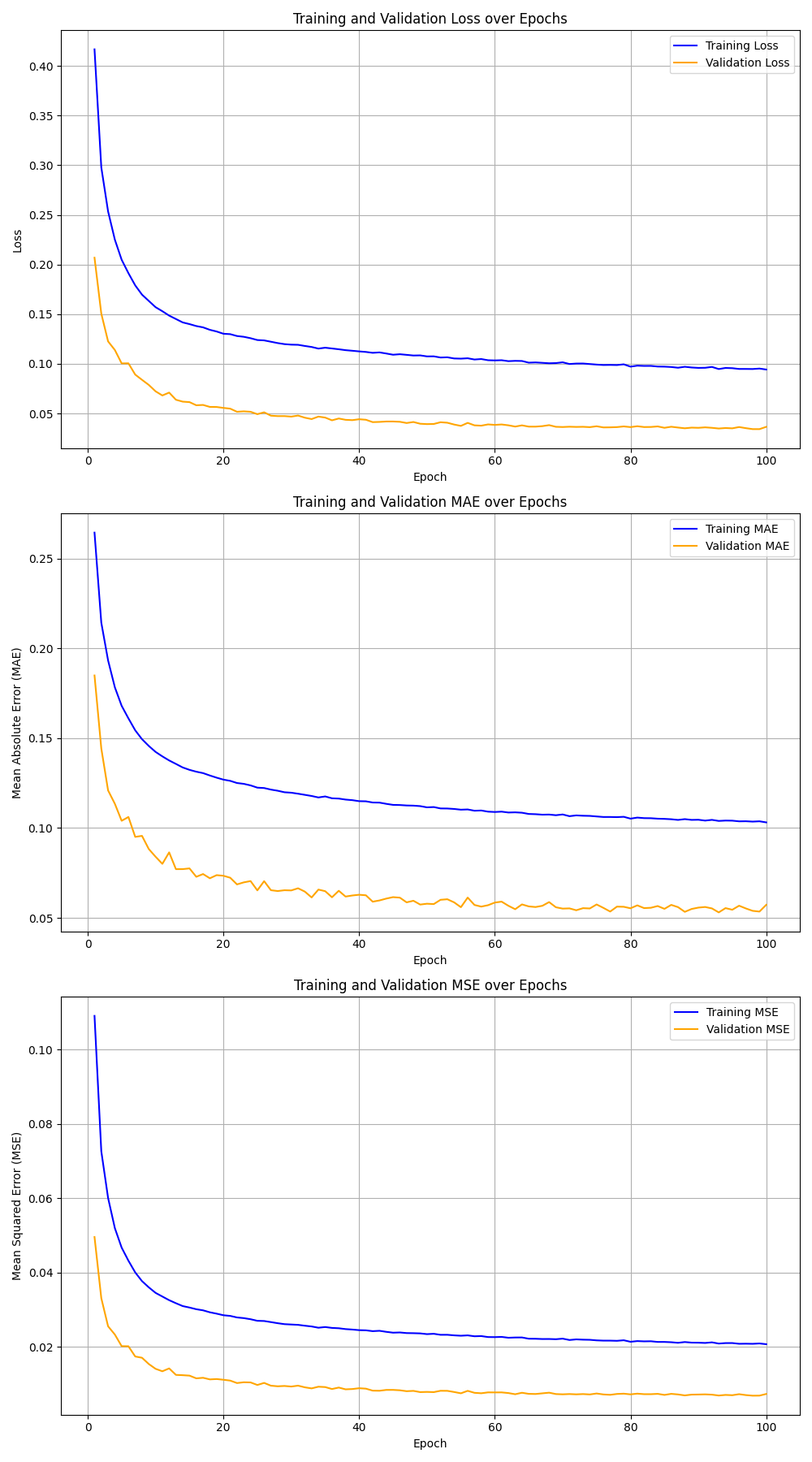
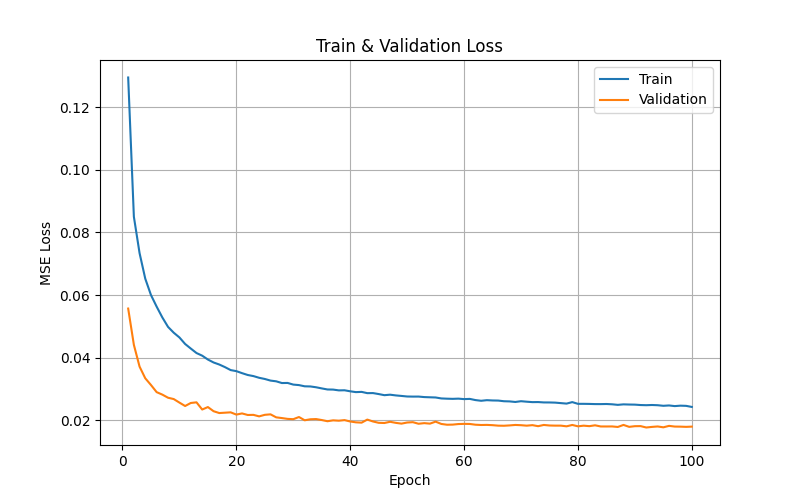
Curvas de entrenamiento</h3>
PilotNet – Pérdida MSE durante entrenamiento y validaciónResNet18 – Pérdida MSE durante entrenamiento y validaciónEfficientNet – Pérdida MSE durante entrenamiento y validación
En esta entrada reporto los resultados de robustez en CARLA Town02 comparando cinco políticas/datasets bajo el mismo circuito de prueba, con 6 repeticiones p...