Week 54 - Control Manual - Entrenamiento y Prueba
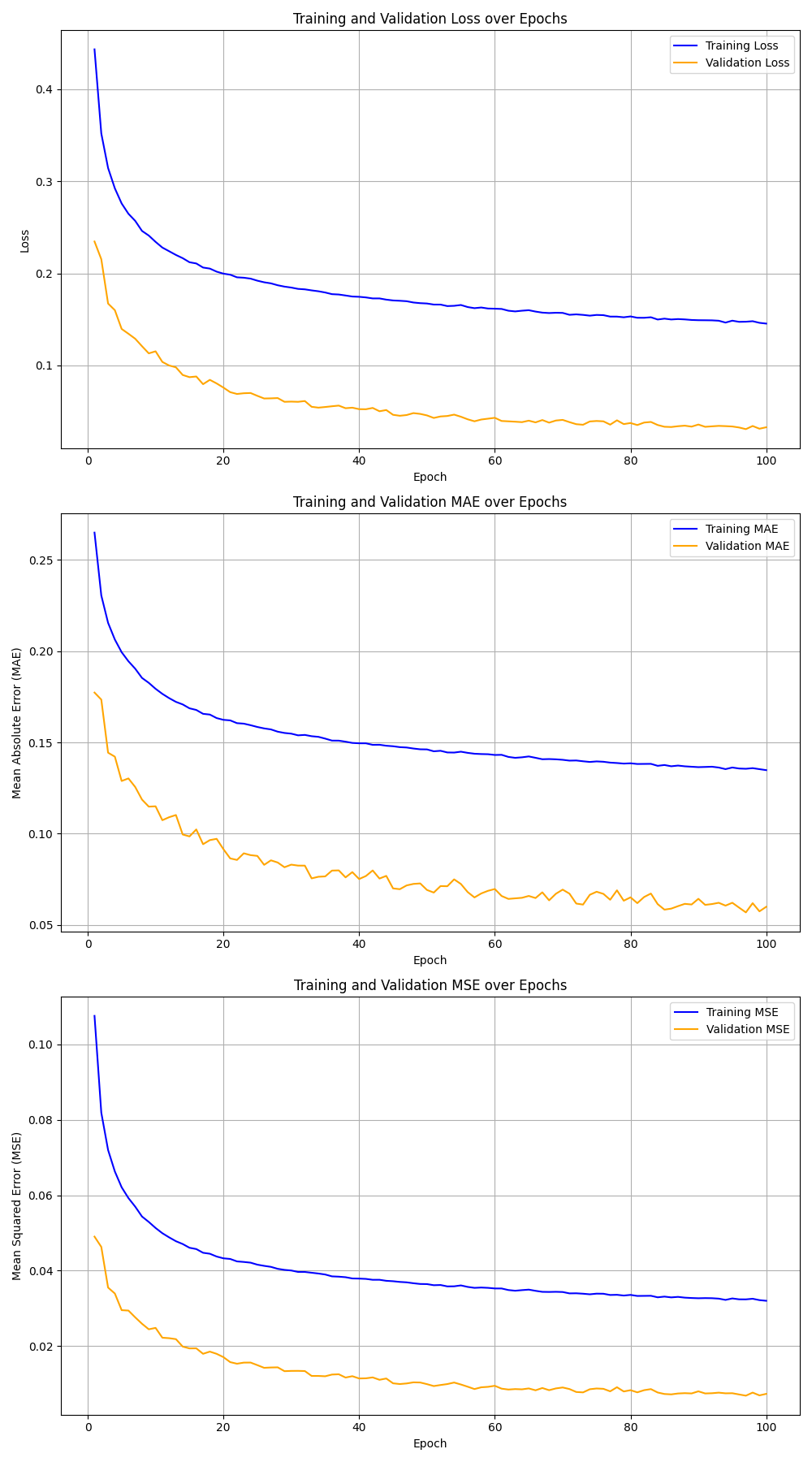
Resultados del Entrenamiento PilotNet en CARLA
Se entrenó un modelo PilotNet usando datos recogidos manualmente en CARLA con un mando de PlayStation, lo cual permitió capturar datos más realistas y suaves, en contraste con el piloto automático.
Configuración del Experimento
| Parámetro | Valor |
|---|---|
| Dataset Size | 85,942 imágenes (segmentadas) |
| Imagen Shape | (66, 200, 3) |
| Batch Size | 256 |
| Learning Rate | 0.000025 |
| Epochs | 100 |
| Test Set (Town02) | 7,822 ejemplos |
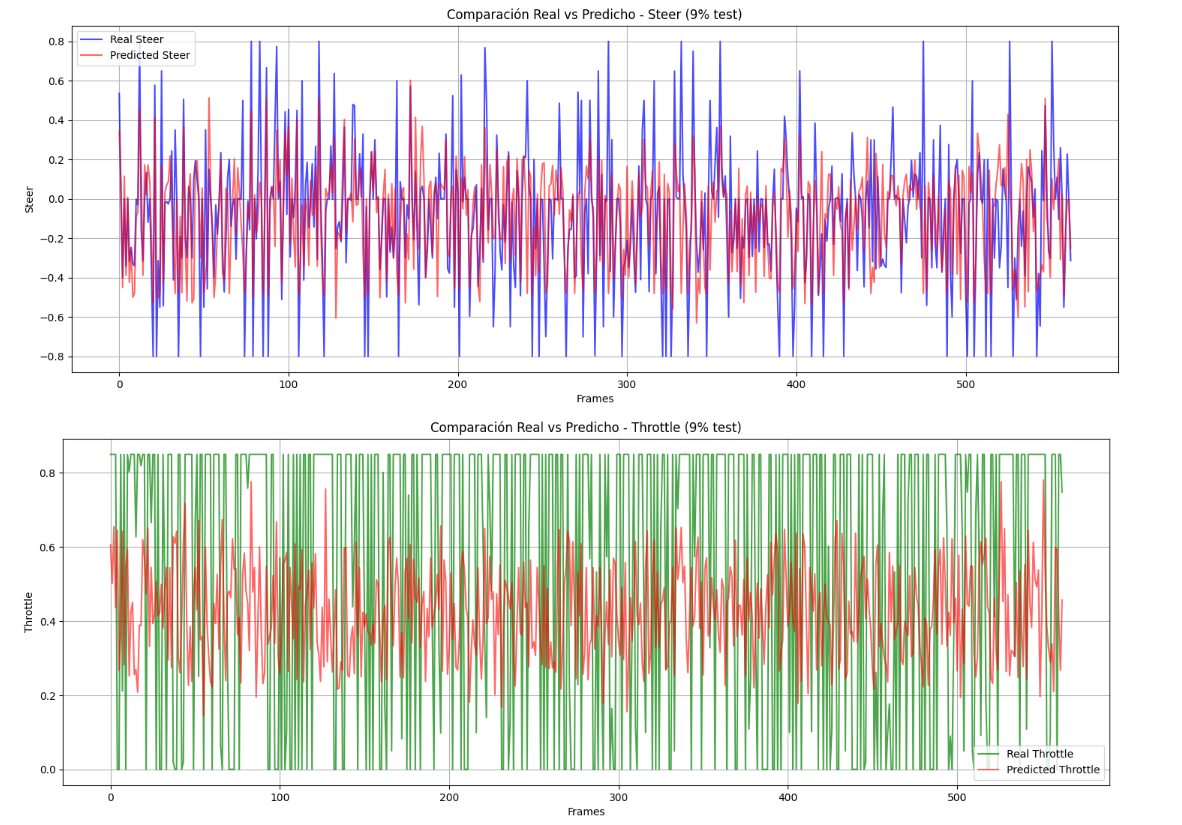
Métricas en Test Set (Town02)
| Variable | MSE | MAE |
|---|---|---|
| Steer | 0.0191 | 0.0929 |
| Throttle | 0.1791 | 0.3973 |
Observaciones
- Throttle: Predicciones más suaves que el comportamiento real, pero siguen la tendencia promedio.
- Steer: Buena correlación con el real, aunque con ligeros desfasajes en picos.
Impacto en Conducción
- Velocidad promedio aumentó de 30 km/h → 40 km/h
- Velocidad máxima alcanzada: 50 km/h
- Navegación más estable y fluida.
Durante la recolección manual, surgieron algunas limitaciones por la falta de pericia del piloto humano, como:
- Zigzagueo en rectas.
- Subirse al andén en curvas cerradas.
- Salidas de carril en situaciones complicadas.
Estas imperfecciones se reflejaron parcialmente en el entrenamiento del modelo. El siguiente paso será construir un dataset más depurado y preciso, lo que podría incidir en una navegación aún más estable y en mayores velocidades promedio.