Week 56 - Test offline para modelos conducción manual
Correción Post anterior
Para esta segunda ejecución se mantuvieron idénticas todas las condiciones de la simulación
(mapa Town02, clima, vehículo Tesla Model 3, punto de partida y modelo DAgger),
modificando únicamente dos parámetros en el archivo de configuración de Behavior Metrics:
| Parámetro | Valor anterior | Nuevo valor | Efecto |
|---|---|---|---|
PilotTimeCycle |
40 ms (25 Hz) | 25 ms (40 Hz) | Aumenta la frecuencia de inferencia del “brain”, produciendo comandos de control más frecuentes. |
AsyncMode |
True | False | Cambia de ejecución asíncrona a síncrona, fijando los ticks y evitando desajustes temporales en la simulación. |
Test Offline
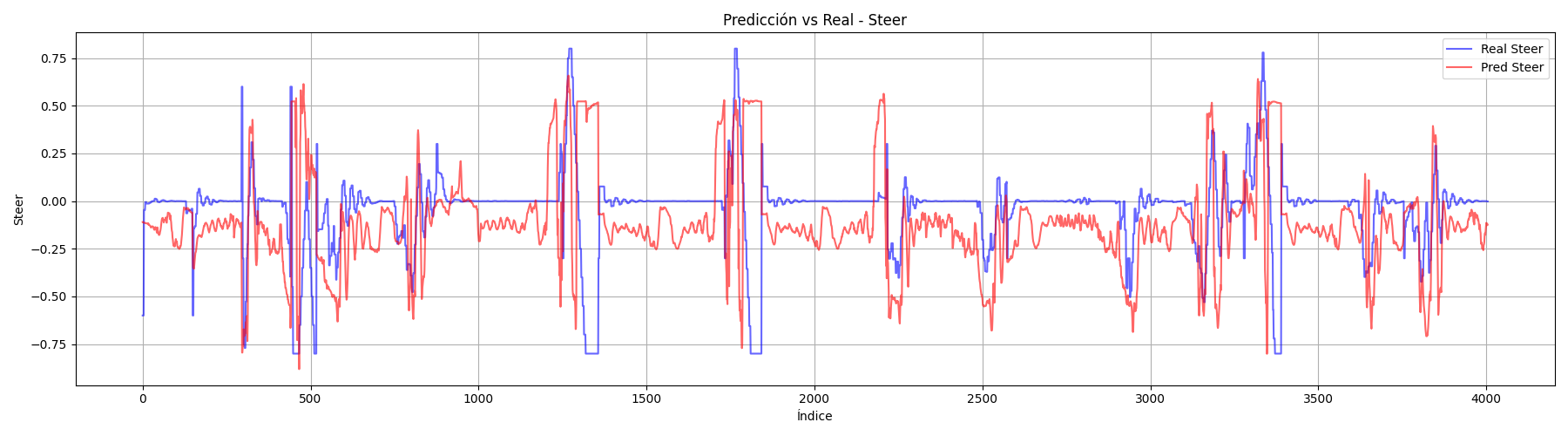
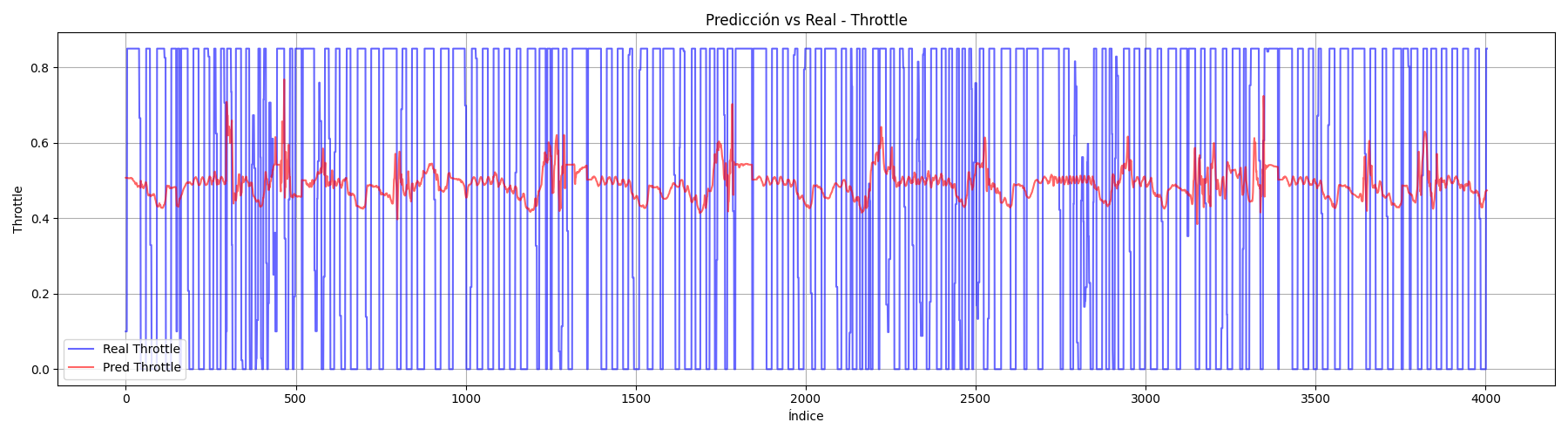
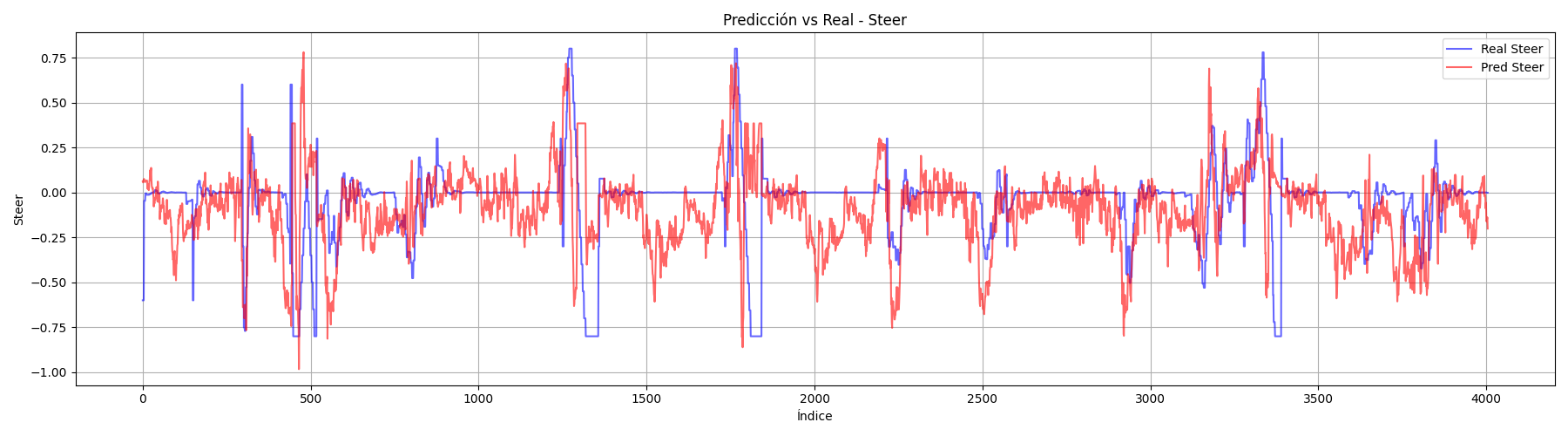
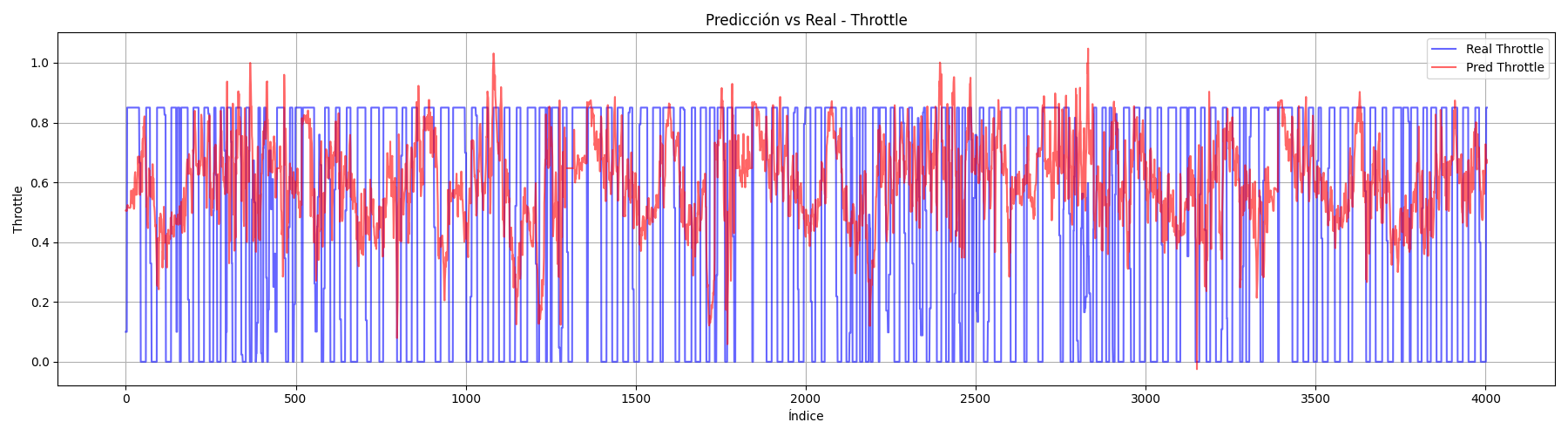
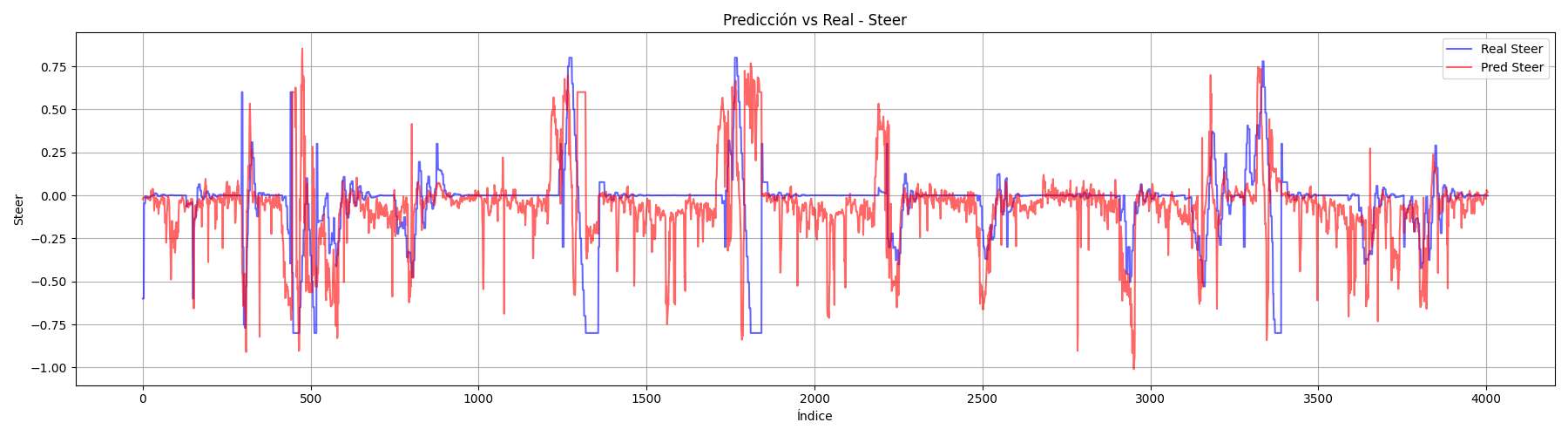
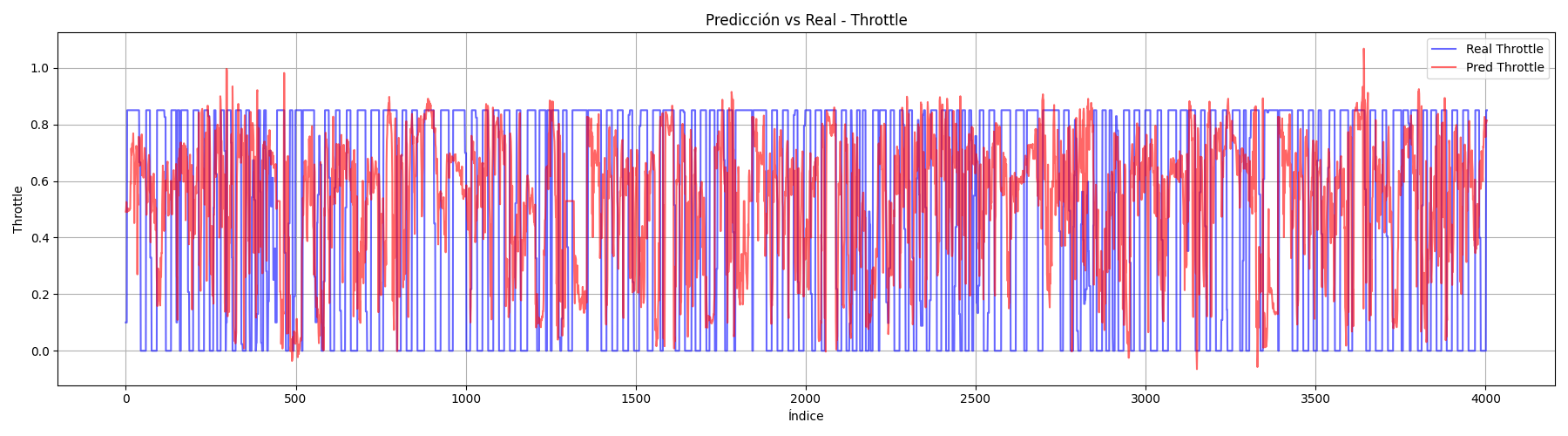
Se realizó una prueba offline para validar los modelos PilotNet, ResNet-18 y EfficientNet-V2 S entrenados exclusivamente con el dataset generado por conducción manual (mandos PlayStation). El conjunto de imágenes de Town 02 se inyectó directamente al módulo de predicciones offline de Behavior Metrics, registrando las pérdidas (MSE/MAE) de steer y throttle sin interferir con el simulador en tiempo real.
| Modelo | Steer MSE | Steer MAE | Throttle MSE | Throttle MAE |
|---|---|---|---|---|
| pilotnet | 0.1123 | 0.2249 | 0.1588 | 0.3846 |
| resnet | 0.0777 | 0.1865 | 0.1859 | 0.3715 |
| efficientnet | 0.0854 | 0.1650 | 0.2146 | 0.3936 |
| Modelo | Steer MSE | Steer RMSE | Steer MAE | Throttle MSE | Throttle RMSE | Throttle MAE |
|---|---|---|---|---|---|---|
| PilotNet | 0.1123 | 0.3351 | 0.2249 | 0.1588 | 0.3985 | 0.3846 |
| ResNet18 | 0.0777 | 0.2788 | 0.1865 | 0.1859 | 0.4311 | 0.3715 |
| EfficientNet | 0.0854 | 0.2922 | 0.1650 | 0.2146 | 0.4633 | 0.3936 |
Nota:
Se actualizó la métrica de evaluación del modelo, reemplazando el cálculo de MSE (Mean Squared Error) por RMSE (Root Mean Squared Error) para reflejar el error en las mismas unidades que la variable objetivo, lo que facilita su interpretación. En la versión instalada de Keras, RMSE está disponible como métrica predefinida. Para mantener consistencia en el pipeline de validación, se modificó la importación de:from sklearn.metrics import mean_squared_errora:
from sklearn.metrics import root_mean_squared_error