Week 66 - Dataset DAgger Teleoperado con estrategia agresiva
Dataset DAgger + Teleoperado(Estrategia agresiva)
Se generó un nuevo dataset con la técnica DAgger + teleoperación, esta vez con una agresividad mayor en la aceleración durante las curvas: se entra a una velocidad suficientemente alta y se mantiene o incrementa el throttle mientras se ejecuta la maniobra. Durante la corrección con DAgger, se prioriza acelerar o sostener la velocidad para recuperar el control sin perder ritmo. Esta estrategia, en ocasiones, puede provocar derrapes o choques en curvas muy exigentes.
Dataset balanceado: 120 000 imágenes.
Test Offline
| Modelo | Steer MSE ↓ | Steer MAE ↓ | Throttle MSE ↓ | Throttle MAE ↓ |
|---|---|---|---|---|
| DAgger agresivo | 0.3391 | 0.2049 | 0.3997 | 0.3301 |
| DAgger suave | 0.2910 | 0.1995 | 0.4920 | 0.4778 |
| Control manual (sin DAgger) | 0.0854 | 0.1650 | 0.2146 | 0.3936 |
Test Online
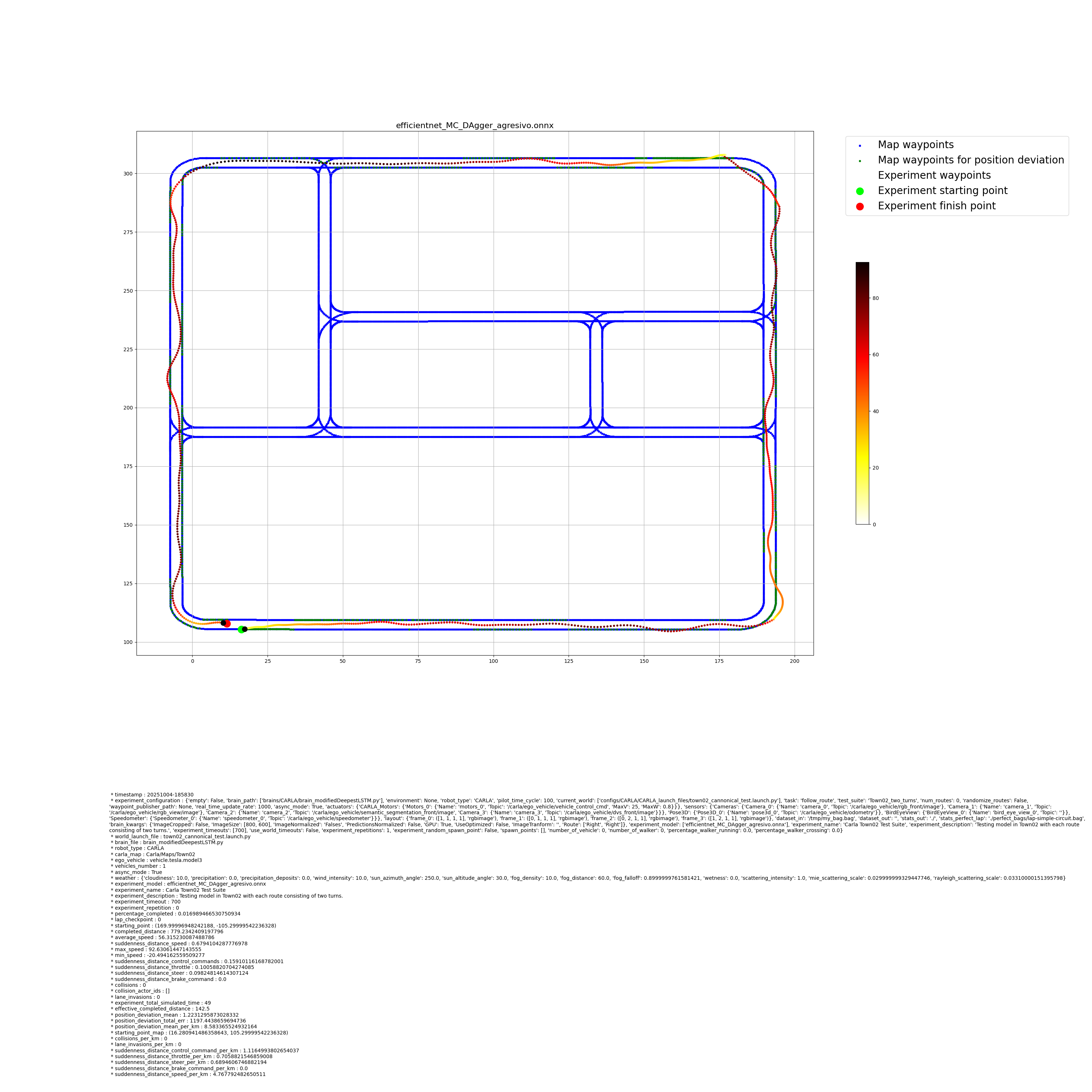
| Métrica | DAgger agresivo (efficientnet_MC_DAgger_agresivo.onnx) |
DAgger suave (efficientnet_CM_dagger.onnx) |
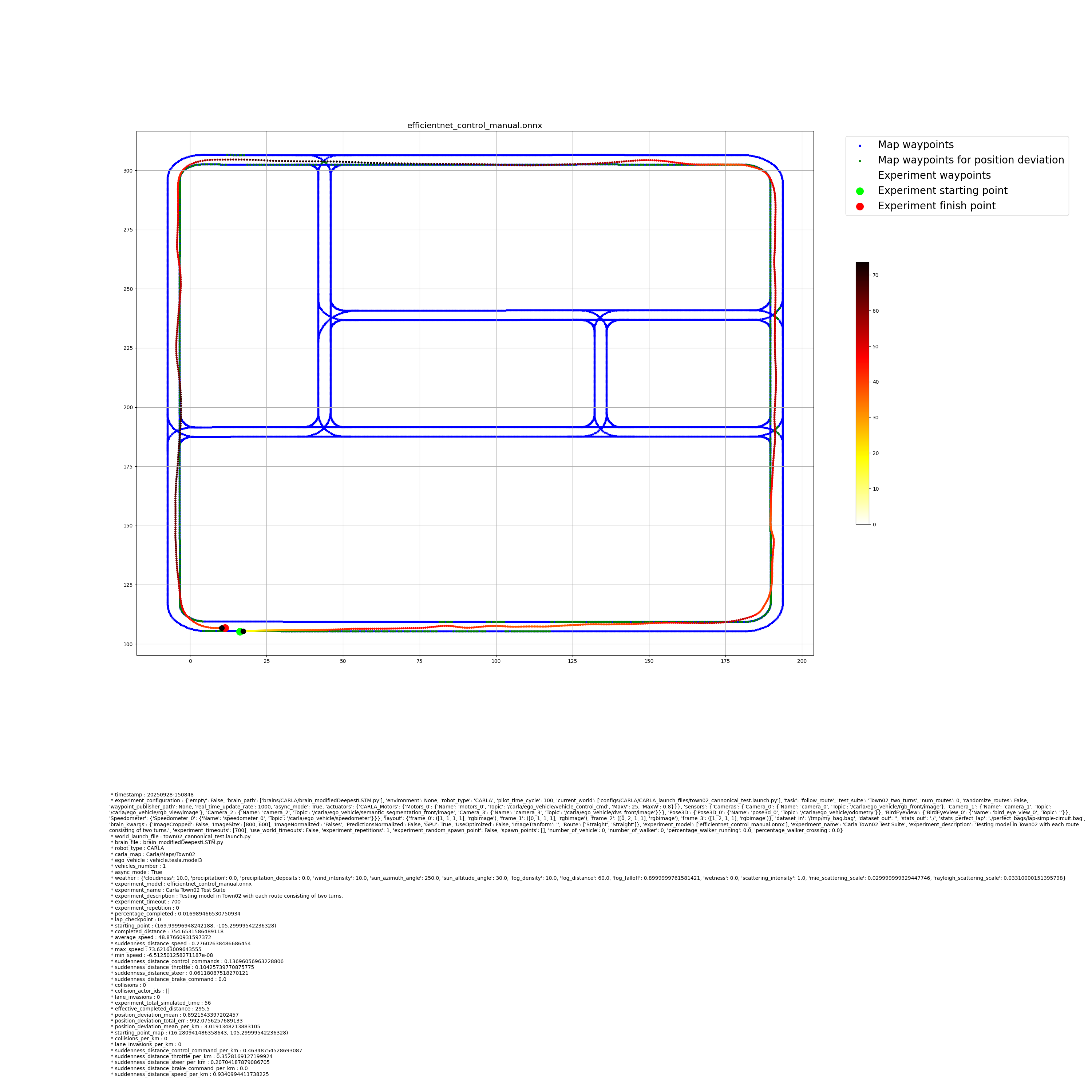
Control manual sin DAgger (efficientnet_control_manual.onnx) |
||
|---|---|---|---|---|---|
| completed_distance (m) | 779.2342409198 | 760.3469321578 | 754.6531586489 | ||
| effective_completed_distance (m) | 142.5 | 90.0 | 295.5 | ||
| average_speed (m/s) | 56.3152300875 | 41.9236515462 | 48.8766093160 | ||
| max_speed (m/s) | 92.6306144714 | 54.1024612427 | 73.6216300964 | ||
| min_speed (m/s) | -20.4941625595 | -6.2457731786e-08 | -6.5125012583e-08 | ||
| suddenness_distance_speed (Σdist) ↓ | 0.6794104288 | 0.2989997684 | 0.2760263849 | ||
| suddenness_distance_control_commands (Σdist) ↓ | 0.1591011617 | 0.1430958504 | 0.1369605696 | ||
| suddenness_distance_throttle (Σdist) ↓ | 0.1005882070 | 0.1113228841 | 0.1042573977 | ||
| suddenness_distance_steer (Σdist) ↓ | 0.0982481461 | 0.0638630983 | 0.0611808752 | ||
| suddenness_distance_brake_command (Σdist) ↓ | 0.0 | 0.0 | 0.0 | ||
| collisions ↓ | 0 | 0 | 0 | ||
| lane_invasions ↓ | 0 | 0 | 0 | ||
| experiment_total_simulated_time (s) ↓ | 49 | 65 | 56 | ||
| experiment_total_real_time (s) ↓ | 107.8681654930 | 128.3368601799 | 124.5458168983 | ||
| position_deviation_mean (m) ↓ | 1.2231295873 | 1.4993750120 | 0.8921543397 | ||
| position_deviation_mean_per_km (m/km) ↓ | 8.5833655249 | 16.6597223551 | 3.0191348214 | ||
| suddenness_distance_control_command_per_km ↓ | 1.1164993803 | 1.5899538928 | 0.4634875453 | ||
| suddenness_distance_throttle_per_km ↓ | 0.7058821547 | 1.2369209349 | 0.3528169127 | ||
| suddenness_distance_steer_per_km ↓ | 0.6894606747 | 0.7095899812 | 0.2070418788 | ||
| suddenness_distance_speed_per_km ↓ | 4.7677924827 | 3.3222196484 | 0.9340994412 | ||
| percentage_completed | 0.0169894665 | 0.0169894665 | 0.0169894665 | ||
| completed_laps | 0 | 0 | 0 | ||
| experiment_timeout (s) | 700 | 700 | 700 |
Resultados
-
Control manual (sin DAgger): mejor seguimiento y confort. Error de posición 3.02 m/km (el más bajo), suddenness por km mínima y mayor distancia efectiva: 295.5 m. Cero colisiones/invasiones.
-
DAgger agresivo: el más rápido (mayor velocidad media y menor tiempo simulado: 49 s), pero con oscilaciones de velocidad más altas y un pico de velocidad mínima negativa (breve reversa/outlier).
-
DAgger suave: peor tracking (16.66 m/km) y menor avance útil (90 m), con suavidad de control inferior al resto.