Semana 21 - Obtención de segundo dataset
Índice
Obtención del dataset
En una primera instancia se consideró usar el piloto experto desarrollado por aerostack2; sin embargo, este tomaba la posición central de la ventana con las tfs para poder pasarlo. Al tener problemas con las tfs de estas mismas y por otras dificultades, se pasó a utilizar el piloto remoto (como se haría en la realidad) para obtener el dataset.
A este se le añadió:
- Con el cuadrado se empezará a grabar y si se pulsa otra vez se detendrá (función anterior del círculo).
- Con el círculo se borrará la anterior grabación por si hubo algún fallo al controlar el drone.
- Con el triángulo, el drone navega a altura constante; para desactivar esta función se vuelve a pulsar triángulo.
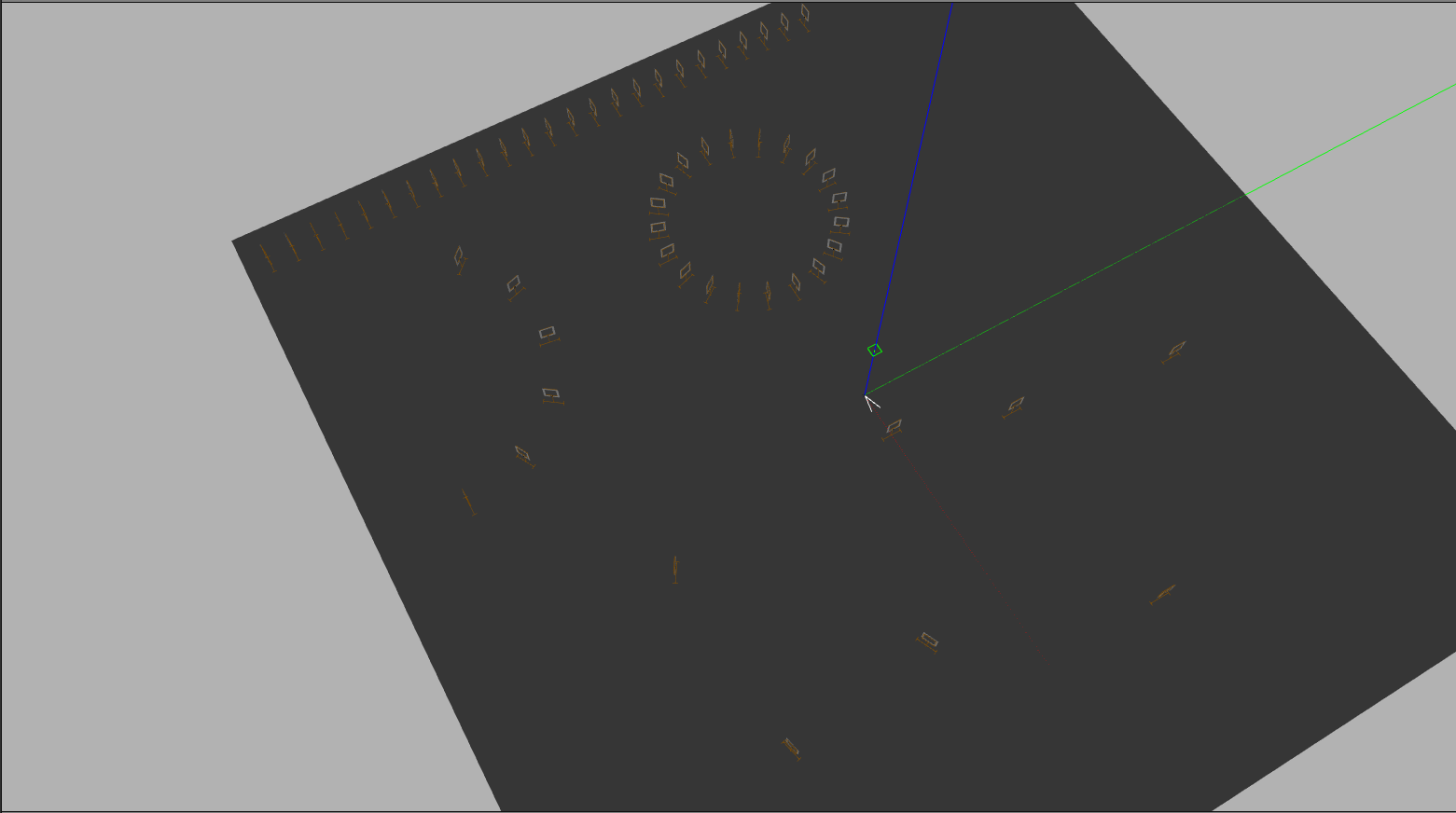
Construcción del mapa
Ya que los mapas eran sencillos, se decidió crearlos. El problema es que colocar las puertas una a una es una tarea bastante tediosa e imprecisa. Por ello, se creó un script de Python que pudiera generar un XML con las puertas necesarias, permitiendo crear círculos perfectos, curvas y rectas con código. Así también se podía conocer su localización concreta para un posterior análisis de resultados.
Análisis de los datasets
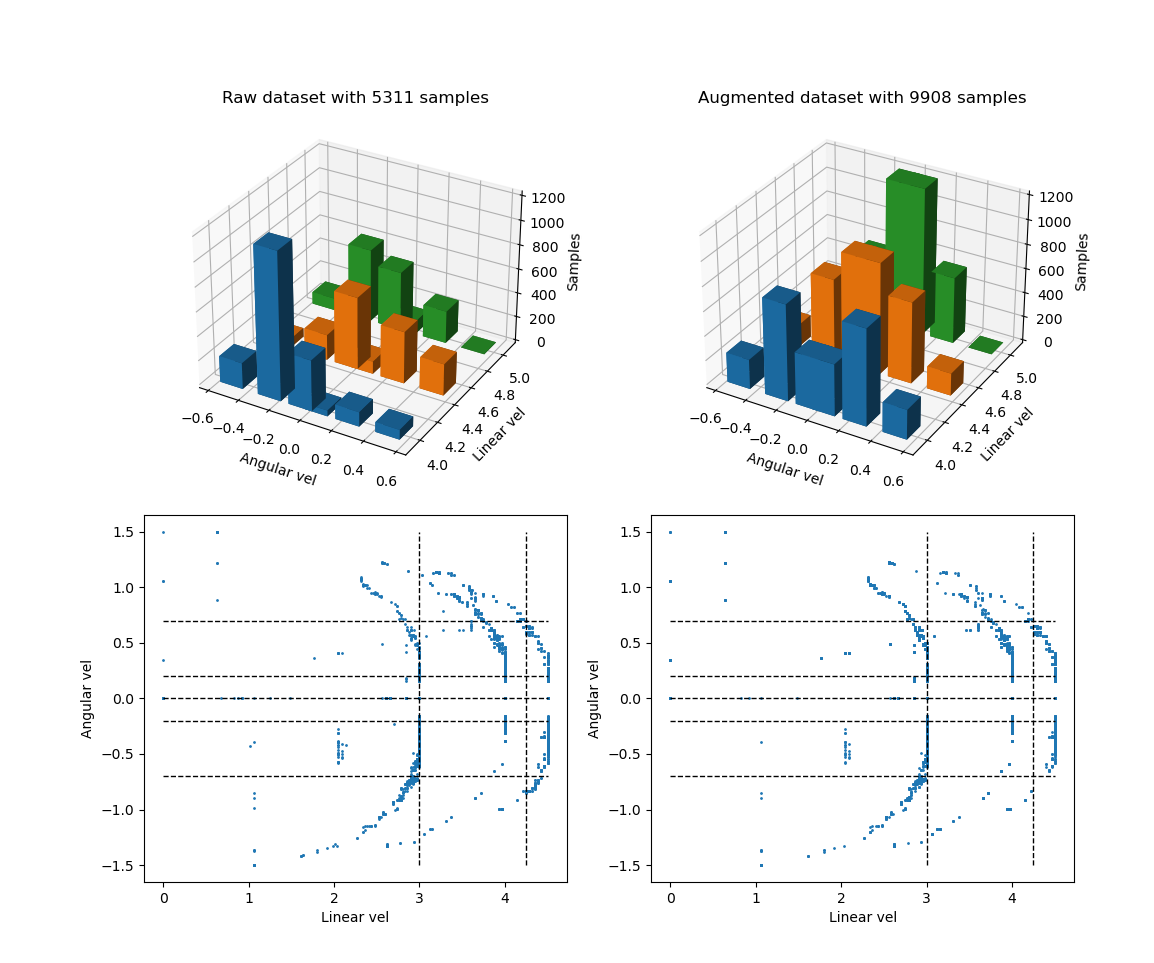
Para la obtención del dataset, se pilotó el drone manualmente, descartando todas las pruebas en las que, por error humano, el drone se chocara. Esta primera prueba se grabó a altura constante.
Viendo los resultados de los datasets obtenidos, también nos dimos cuenta de que la distribución de etiquetas no era igualmente aplicable para el ejercicio anterior como para este. La distribución, según los criterios del “sigue líneas”, quedaría de la siguiente manera:
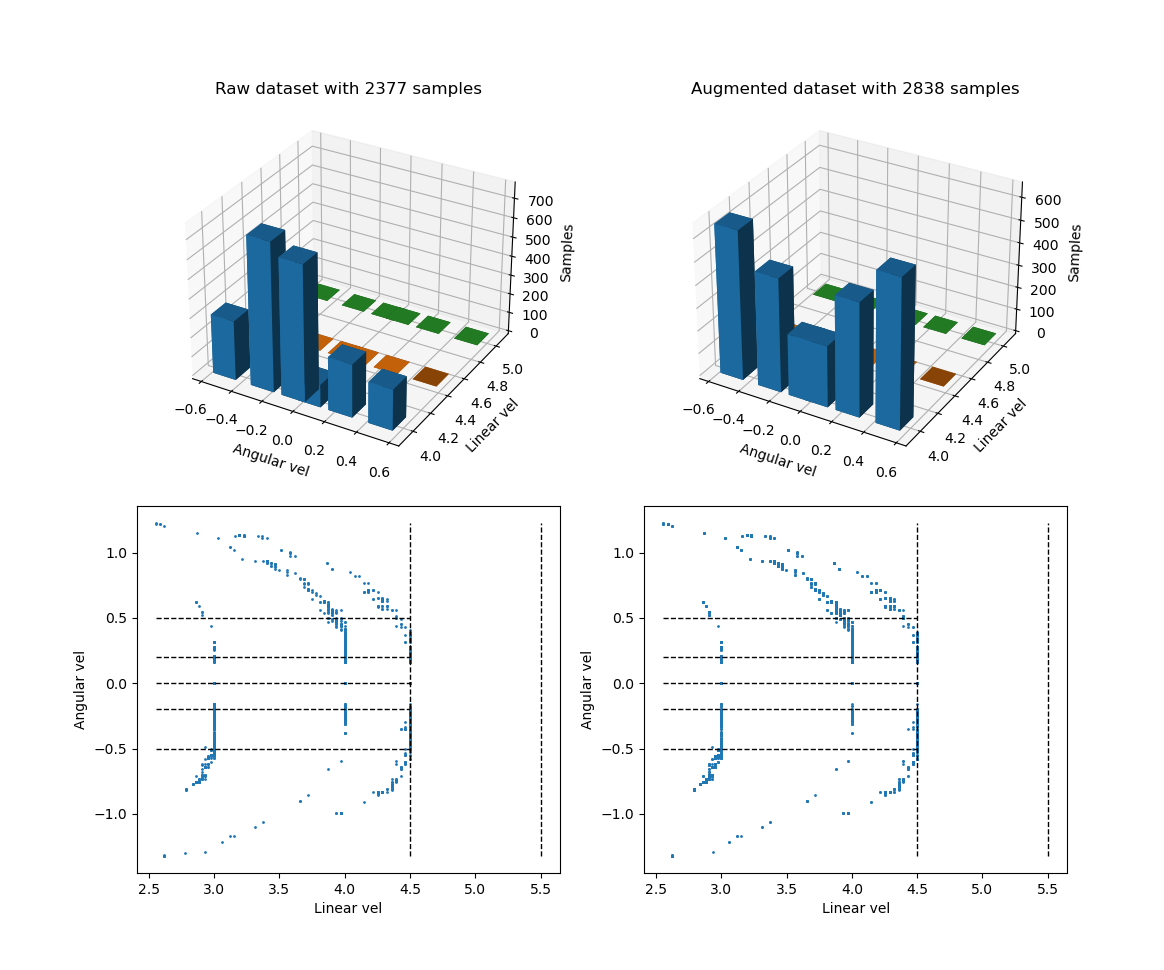
Por lo que se modificaron los valores, dando la siguiente distribución: