
Semana 24 - Mejorando piloto neuronal cruza ventanas
Índice
Piloto experto adicional
Se creó un piloto experto donde se generan ventanas pseudo aleatorias con una mayor distancia que el programa anterior para crear más casos:
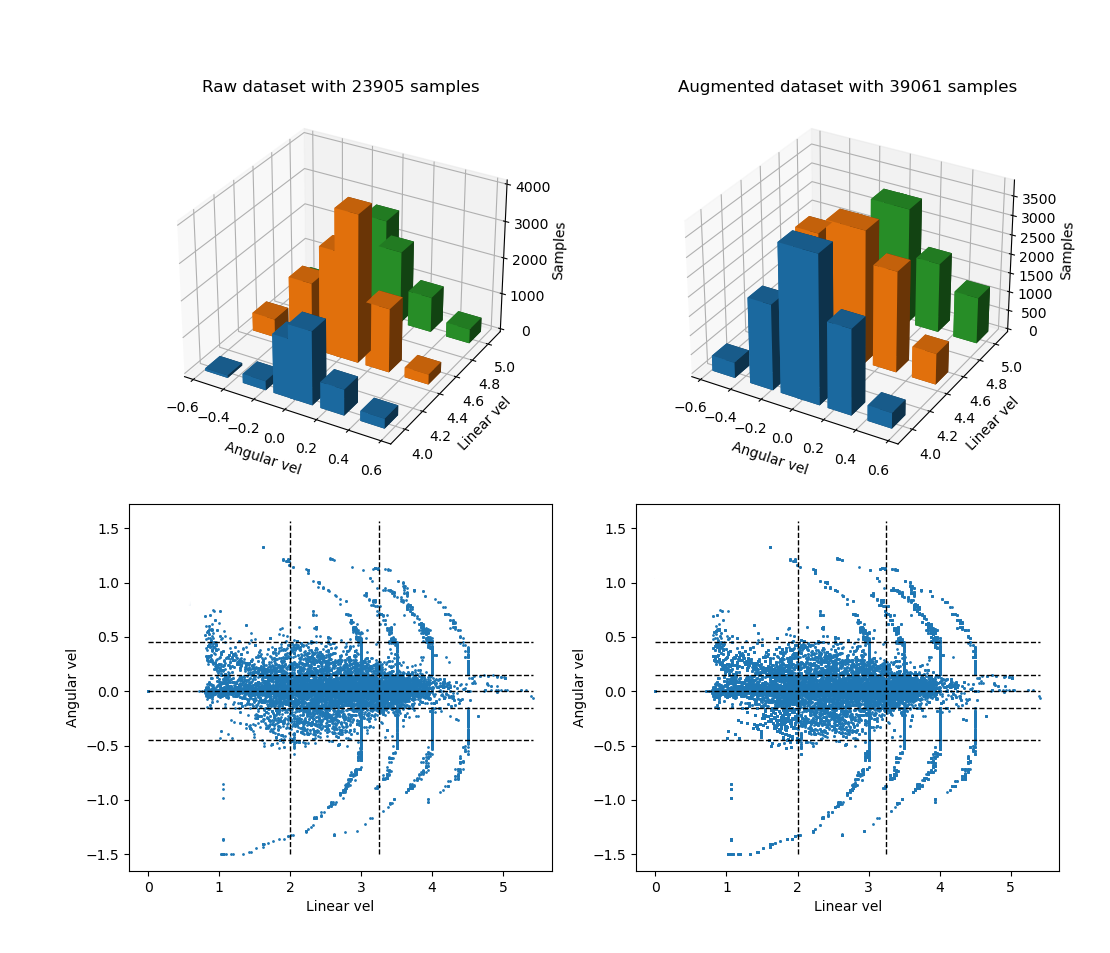
Quedando el nuevo dataset de la siguiente manera con 23905 muestras en crudo y 39061 muestras con el dataset balanceado:
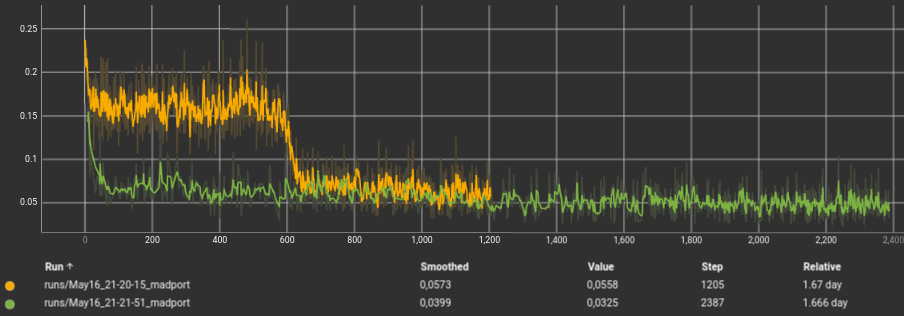
Respecto al entrenamiento, podemos ver cómo en la gráfica amarilla le cuesta más estabilizarse. Esto se debe a que esta curva se realizó con augmentation y la verde solo con el dataset balanceado:
Pruebas
Después de un primer intento fallido, se descubrió probando el piloto remoto con el sigue líneas que tampoco funcionaba con esa implementación. De nuevo se aumentó el dataset y se hicieron más pruebas con el piloto corregido.
Uno de los errores planteados fue que el programa tuviera algún defecto y no tuviera un tiempo de respuesta adecuado. Accediendo al archivo de profiling creado en cada ejecución, se comprobó que este no era el problema:

Se comprobaron visualmente las medidas de las imágenes con sus respectivos labels, y también cuadraban.
Curiosamente, al realizar una prueba para una demostración, me di cuenta que con el control remoto, utilizando la función del sigue líneas, tampoco funcionaba. Al depurar el fallo, me di cuenta de que había un error en la extracción de la velocidad neuronal.
Una vez revisado de nuevo todo el código, se realizó la prueba con un nuevo entrenamiento de este dataset, revisado de nuevo de manera manual, permitiendo eliminar posibles fallos no deseados, como por ejemplo que el dron se detenga completamente tras pasar cada puerta (comportamiento observado en las ejecuciones de una sola ventana).