
Semana 12. Segmentación mediante descriptores
En esta semana he estado trabajando en la manera de implementar un segmentador de la nube de pintos Lidar empleando descriptores.
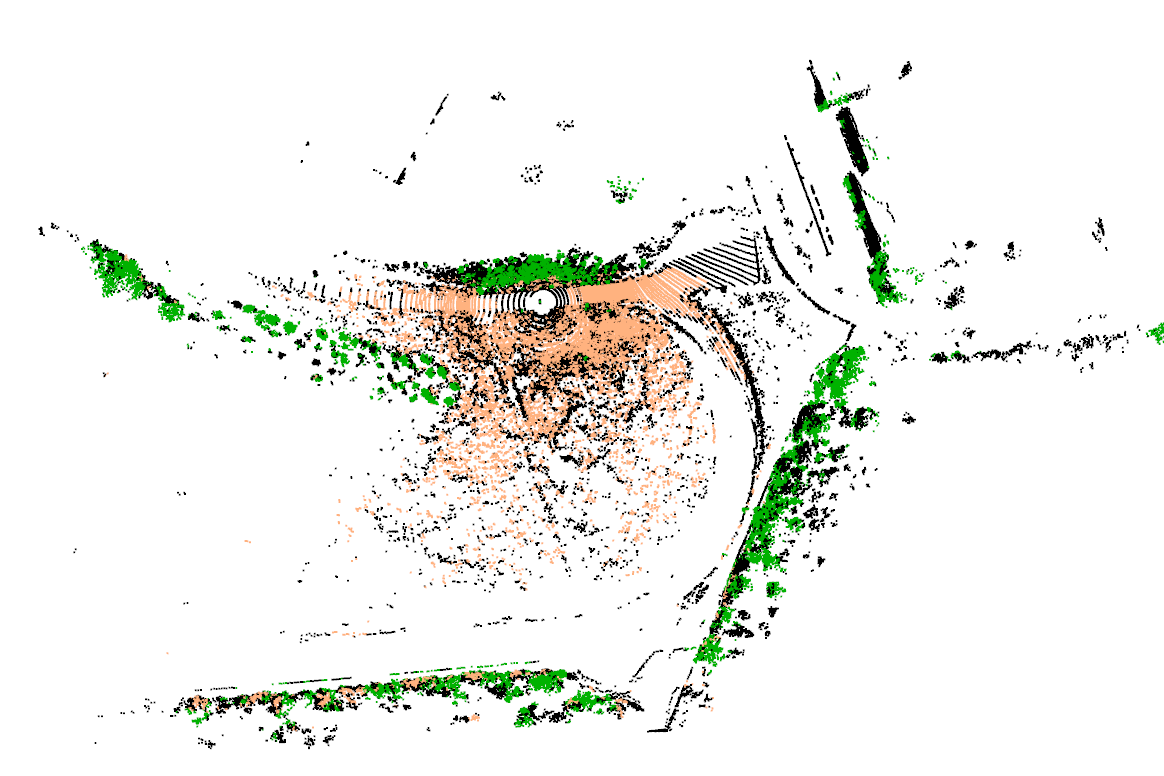
He obtenido un progrmama que es capaz de diferenciar entre los puntos que pertenecen al suelo y los que pertenecen a árboles.
Para obtener esta segmentación he utilizado los descriptores de planaridad, a demas de la altura de los puntos para la detección del suelo. Para la detección de los árboles he utilizado la variación superficial. Obteniendo el resultado que se muestra en la figura.
El problema que he encontrado al trabajar de esta forma es el bajo rendimiento, ya que el cálculo es demasiado lento y no me permite trabajar con varios archivos, unicamente he sido capaz de analizar un archivo.