Semana 2. Visor 3d
En la segunda semana, trabajaré principalmente en el desarrollo en Python de un visor 3d para puntos lidar. Ademas de solucionar los problemas con la instalacion del simulador Carla.
Esta semana comienzo tambien con la elaboración de este blog en el que comento el avance en el trabajo semana a semana.
Para el visor 3d he realizado dos posibles opciones empleando dos librerias diferentes de python.
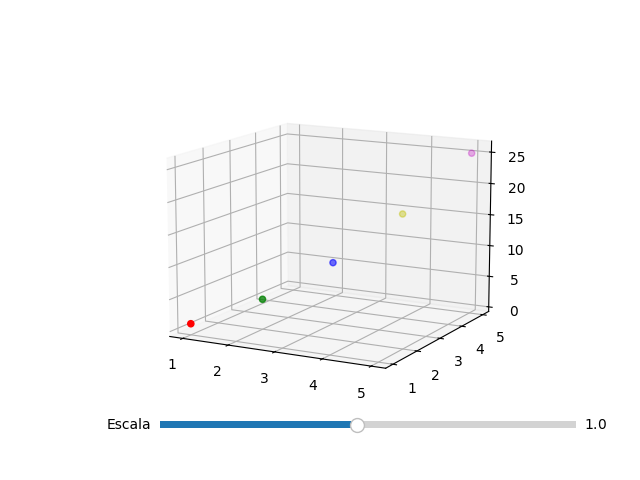
Utilizando Matplotlib:
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from matplotlib.widgets import Slider
import numpy as np
# Coordenadas de los puntos que quieres dibujar
x = np.array([1, 2, 3, 4, 5])
y = np.array([1, 2, 3, 4, 5])
z = np.array([1, 4, 9, 16, 25])
# Colores de los puntos
colors = np.array(['r', 'g', 'b', 'y', 'm']) # r: rojo, g: verde, b: azul, y: amarillo, m: magenta
# Crear la figura y el eje 3D
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
scatter = ax.scatter(x, y, z, c=colors)
# Añadir un slider para manejar la escala
ax_slider = plt.axes([0.25, 0.1, 0.65, 0.03])
slider = Slider(ax_slider, 'Escala', 0.1, 2.0, valinit=1.0)
def update(val):
scale = slider.val
ax.clear()
ax.scatter(x, y, z, c=colors)
ax.set_xlim([min(x) * scale, max(x) * scale])
ax.set_ylim([min(y) * scale, max(y) * scale])
ax.set_zlim([min(z) * scale, max(z) * scale])
plt.draw()
slider.on_changed(update)
plt.show()
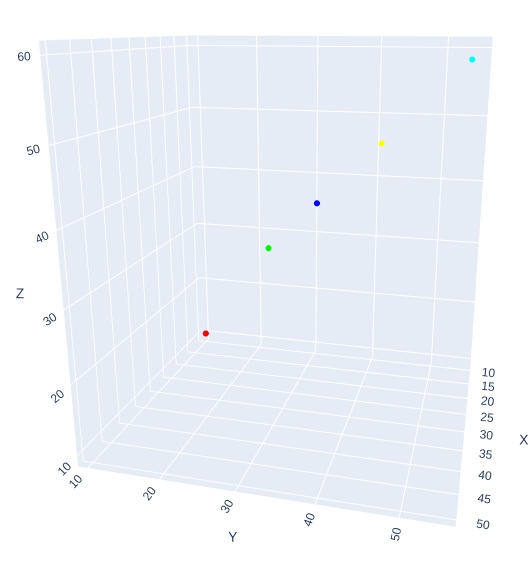
Utilizando Ploty:
import numpy as np
import plotly.graph_objects as go
import plotly.io as pio
# Puedes probar diferentes renderizadores según tu entorno
# pio.renderers.default = 'notebook' # Intenta con 'inline' si estás en Jupyter
# Función para convertir RGB a formato hexadecimal
def rgb_to_hex(r, g, b):
# Asegurarse de que los valores r, g, b sean enteros
r, g, b = int(r), int(g), int(b)
return f'#{r:02x}{g:02x}{b:02x}'
# Función que genera un gráfico 3D con Plotly
def plot_lidar_data(x_vals, y_vals, z_vals, colors):
fig = go.Figure(data=[go.Scatter3d(
x=x_vals,
y=y_vals,
z=z_vals,
mode='markers',
marker=dict(
size=2,
color=colors,
)
)])
fig.update_layout(scene=dict(
xaxis_title='X',
yaxis_title='Y',
zaxis_title='Z'
))
fig.show()
# Ejemplo de datos personalizados
x_vals = [10, 20, 30, 40, 50]
y_vals = [10, 25, 35, 45, 55]
z_vals = [10, 30, 40, 50, 60]
colors = [rgb_to_hex(255, 0, 0), rgb_to_hex(0, 255, 0), rgb_to_hex(0, 0, 255), rgb_to_hex(255, 255, 0), rgb_to_hex(0, 255, 255)]
# Llamada a la función para generar el gráfico
plot_lidar_data(x_vals, y_vals, z_vals, colors)