Semana 23. Optimización de los metodos de densificación:Vectorización de TIN e IDW
Esta semana he realizado una optimización de los algoritmos de densificación TIN (Triangulated Irregular Network) e IDW (Inverse Distance Weighting), eliminando los bucles y sustituyendolos por operaciones matriciales vectorizadas. Este cambio ha significado una mejor significativa en el rendimiento computacional.
En ambos casos (TIN e IDW) los puntos se cargan como arrays NumPy 2D con forma (N, 3) y (N, 1) donde N es el número de puntos y 3 corresponde las coordenadas (x,y,z).
Optimización en el metodo TIN
Los principales cambios realizados en el algoritmo TIN incluyen:
-
Generación vectorizada de coordenadas baricéntricas: Donde antes se usaban bucles
forpara generar los puntos en cada triángulo, ahora se generan matrices de todas las coordenadas baricéntricas en una sola operación. -
Interpolación vectorizada de puntos y valores: Se utilizan operaciones matriciales para calcular todos los nuevos puntos en una sola ejecución.
La nueva función encargada de la aplicacionde este método es la siguiente:
def densify_point_cloud(points: np.ndarray, remissions: np.ndarray,
density_factor: float = 5.0) -> Tuple[np.ndarray, np.ndarray]:
"""
Densifica la nube de puntos utilizando triangulación de Delaunay e interpolación lineal.
"""
# Crear la triangulación de Delaunay
tri = Delaunay(points[:, :2]) # Toma las coordenadas (x, y) para la triangulación
# Calcular el número de nuevos puntos a crear
num_original_points = len(points)
num_new_points = int(num_original_points * (density_factor-1))
# Calcular el número de puntos a generar por triángulo
num_triangles = len(tri.simplices)
# Distribuir puntos por los trangulos
base_points_per_tri = num_new_points // num_triangles
extra_points = num_new_points % num_triangles
# Crear máscara para triángulos que reciben punto extra
extra_mask = np.zeros(num_triangles, dtype=bool)
extra_mask[:extra_points] = True
# Vector de conteo de puntos por triángulo
points_per_triangle = np.full(num_triangles, base_points_per_tri)
points_per_triangle[extra_mask] += 1
# Generar coordenadas baricéntricas para todos los puntos
total_points = np.sum(points_per_triangle)
# Generar coordenadas aleatorias
w1_w2 = np.random.rand(total_points, 2)
mask = w1_w2.sum(axis=1) > 1
w1_w2[mask] = 1 - w1_w2[mask]
w3 = 1 - w1_w2.sum(axis=1)
barycentric = np.column_stack((w1_w2, w3))
# Asignar triángulos a cada punto nuevo
triangle_indices = np.repeat(np.arange(num_triangles), points_per_triangle)
# Obtener vértices para cada punto nuevo
vertices = points[tri.simplices[triangle_indices]]
vertex_remissions = remissions[tri.simplices[triangle_indices]]
# Interpolación vectorizada
new_points = np.sum(barycentric[:, :, None] * vertices, axis=1)
new_remissions = np.sum(barycentric * vertex_remissions, axis=1)
# Combinar resultados
combined_points = np.vstack([points, new_points])
combined_remissions = np.concatenate([remissions, new_remissions])
return combined_points, combined_remissions
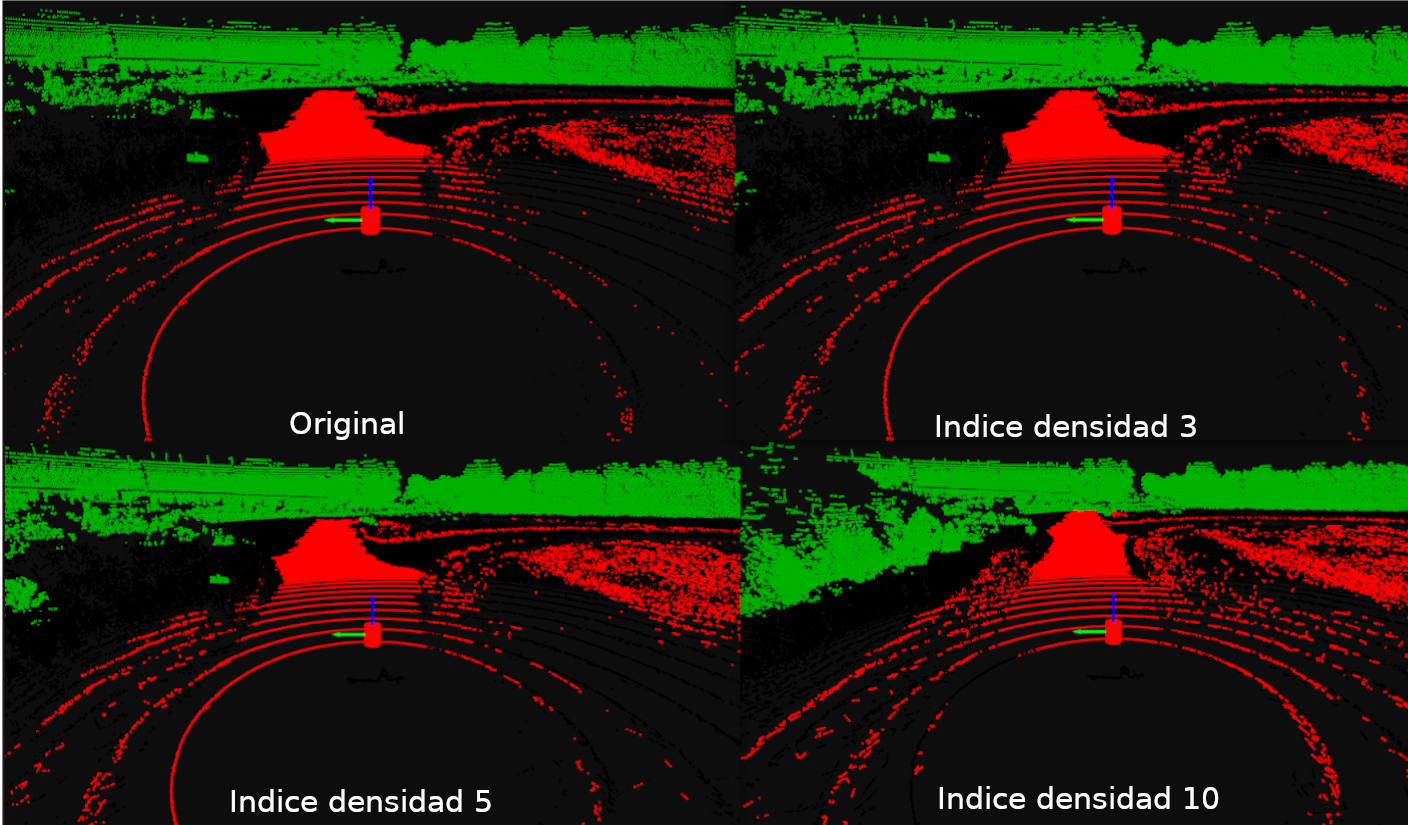
Los resultados de aplicar la densificación TIN variando el indice de densidad se muestra en la imagen siguiente:
Optimización en el método IDW
Para el algoritmo IDW, las mejoras incluyen:
-
Selección vectorizada de puntos base: Mediante el uso de
np.random.choizese seleccionan todos los puntos base (puntos de la nube original que se usarán para la interpolación) a la vez. -
Cálculo matricial de distancias y pesos:Se calcula simultaneamente las distnacias y pesos de interpolación.
La nueva función de densificación queda de la siguiente forma:
def densify_point_cloud(points: np.ndarray, remissions: np.ndarray,
density_factor: float = 5.0) -> Tuple[np.ndarray, np.ndarray]:
"""
Versión vectorizada de la densificación de nubes de puntos LIDAR.
"""
# Establecer el número de nuevos puntos a crear
num_new_points = int((len(points) * (density_factor-1)))
# Seleccionar puntos base de manera balanceada
indices = np.random.choice(len(points), size=num_new_points, replace=True)
unique_indices, counts = np.unique(indices, return_counts=True)
point_usage_count = dict(zip(unique_indices, counts))
# Encontrar vecinos más cercanos para todos los puntos seleccionados a la vez
nn = NearestNeighbors(n_neighbors=2).fit(points)
distances, neighbor_indices = nn.kneighbors(points[indices])
# Los vecinos son la segunda columna (la primera es el punto mismo)
neighbor_points = points[neighbor_indices[:, 1]]
neighbor_remissions = remissions[neighbor_indices[:, 1]]
#Parámetros de la distribución normal truncada
media = 0.5
desviacion_estandar = 0.2
limite_inferior = 0
limite_superior = 1
#Convertir los límites al espacio de la distribucion normal
a = (limite_inferior - media) / desviacion_estandar
b = (limite_superior - media) / desviacion_estandar
lambdas = truncnorm.rvs(a, b, loc=media, scale=desviacion_estandar, size=num_new_points)
# Interpolación vectorizada de puntos
base_points = points[indices]
interpolated_points = lambdas[:, None] * base_points + (1 - lambdas[:, None]) * neighbor_points
# Interpolación vectorizada de remisiones
d_A = np.linalg.norm(interpolated_points - base_points, axis=1)
d_B = np.linalg.norm(interpolated_points - neighbor_points, axis=1)
# Evitar divisiones por cero
d_A = np.where(d_A == 0, 1e-10, d_A)
d_B = np.where(d_B == 0, 1e-10, d_B)
w_A = 1 / d_A
w_B = 1 / d_B
base_remissions = remissions[indices]
interpolated_remissions = (w_A * base_remissions + w_B * neighbor_remissions) / (w_A + w_B)
# 6. Combinar resultados
combined_points = np.vstack([points, interpolated_points])
combined_remissions = np.concatenate([remissions, interpolated_remissions])
return combined_points, combined_remissions
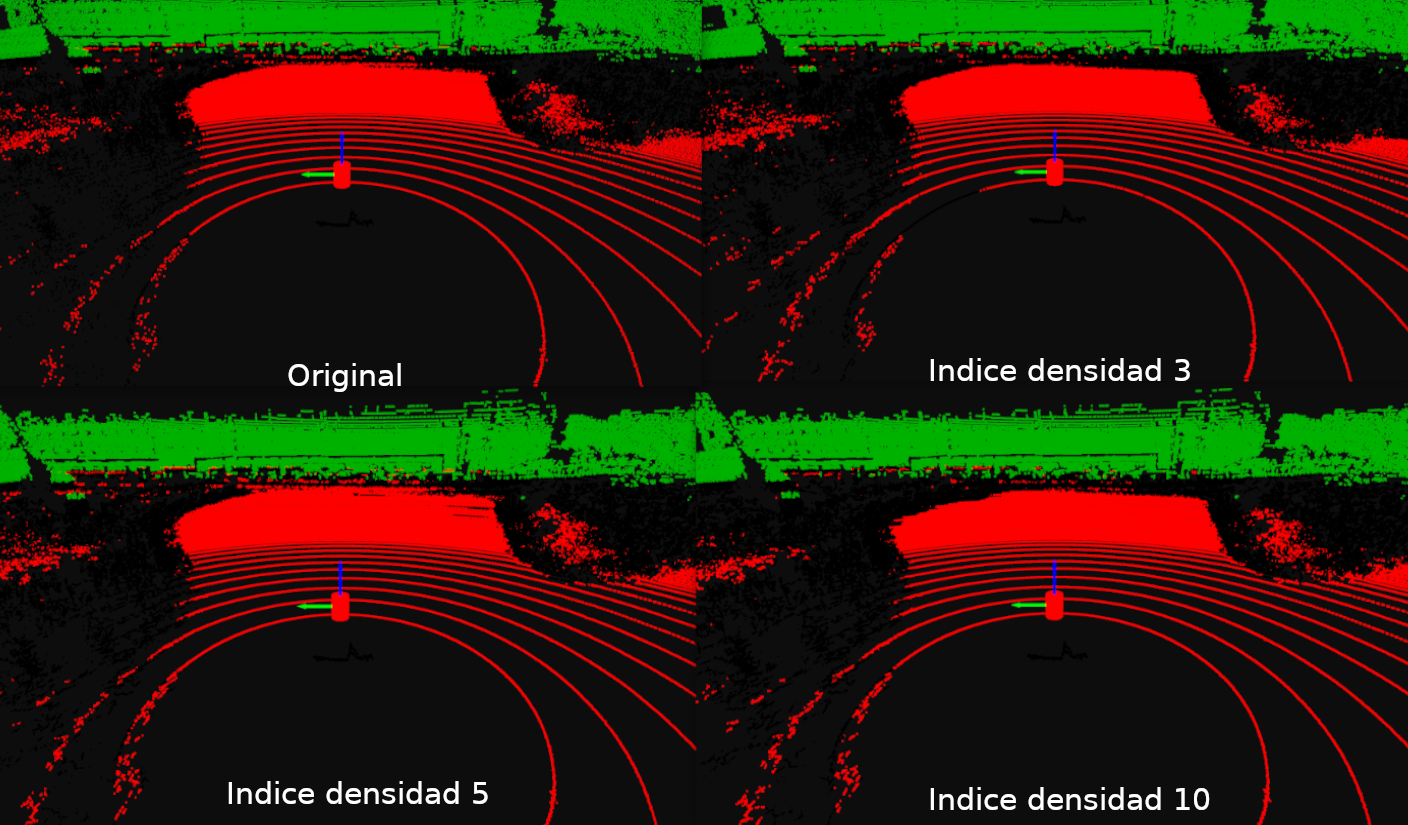
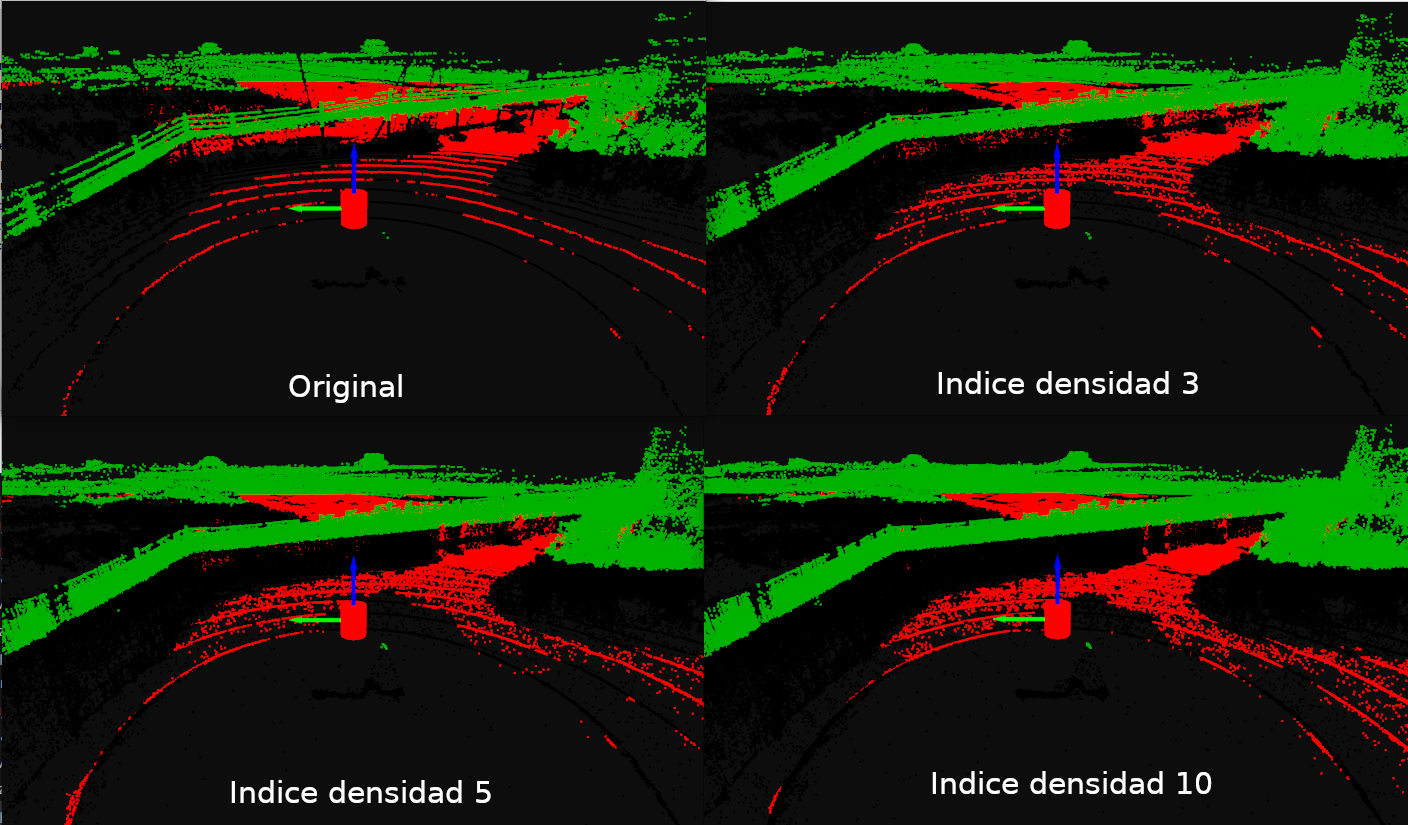
En las siguientes imágenes se muestran los resultados de aplicar IDW en las nubes de puntos de goose.