Semana 26. Modificación del transformador de nubes para crear nubes test etiquetadas
El trabajo de esta semana ha consistido en la actualización del tranformador de nubes (aumento y disminucion de numero de punto y ruido) para que genere nubes etiquetadas para poder usar como test en la segmentación semántica.
Además se ha probado el modelo de PointNet++ entrenado por el compañero Felix aplicando ligeras modificaciones en el preprocesado de las nubes, de manera que no se submuestrean las nubes para tener un numero fijo a la entrada, sino que inicamente se recorta la nube a un radio de 25 metros pero se toman todos los puntos que se encuentren en este radio.
He dado con dos problemas, que aunque permiten trabajar ralentizan la forma de ahcerlo, ya que solo se punede pasar al modelo nubes de una en una al no tener todas el mismo numero de puntos. También, en los casos de aumentar el numero de puntos demasiado no hay memoria suficiente pero se puede trabajar siempre que el aumento no sea excesivo.
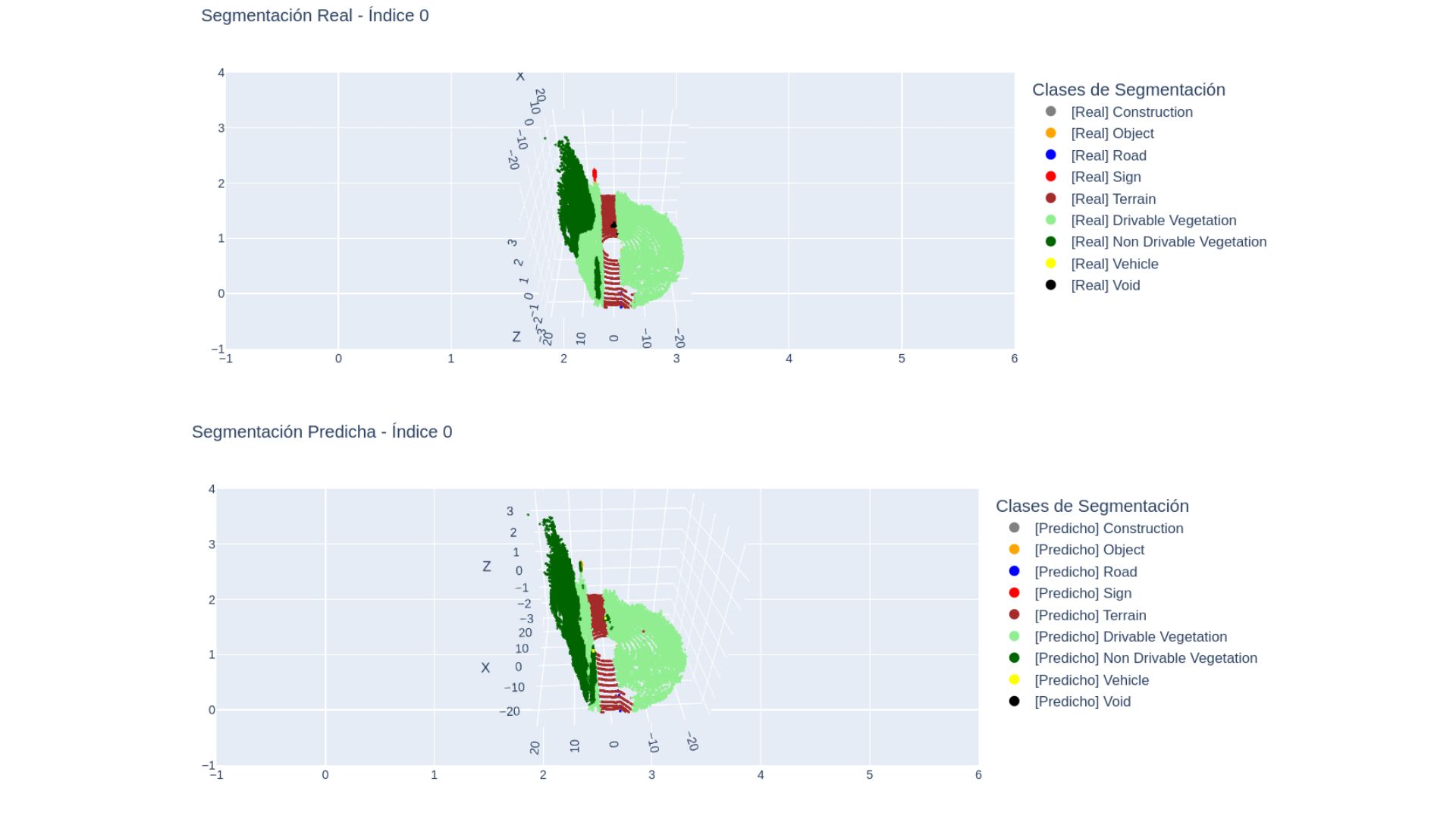
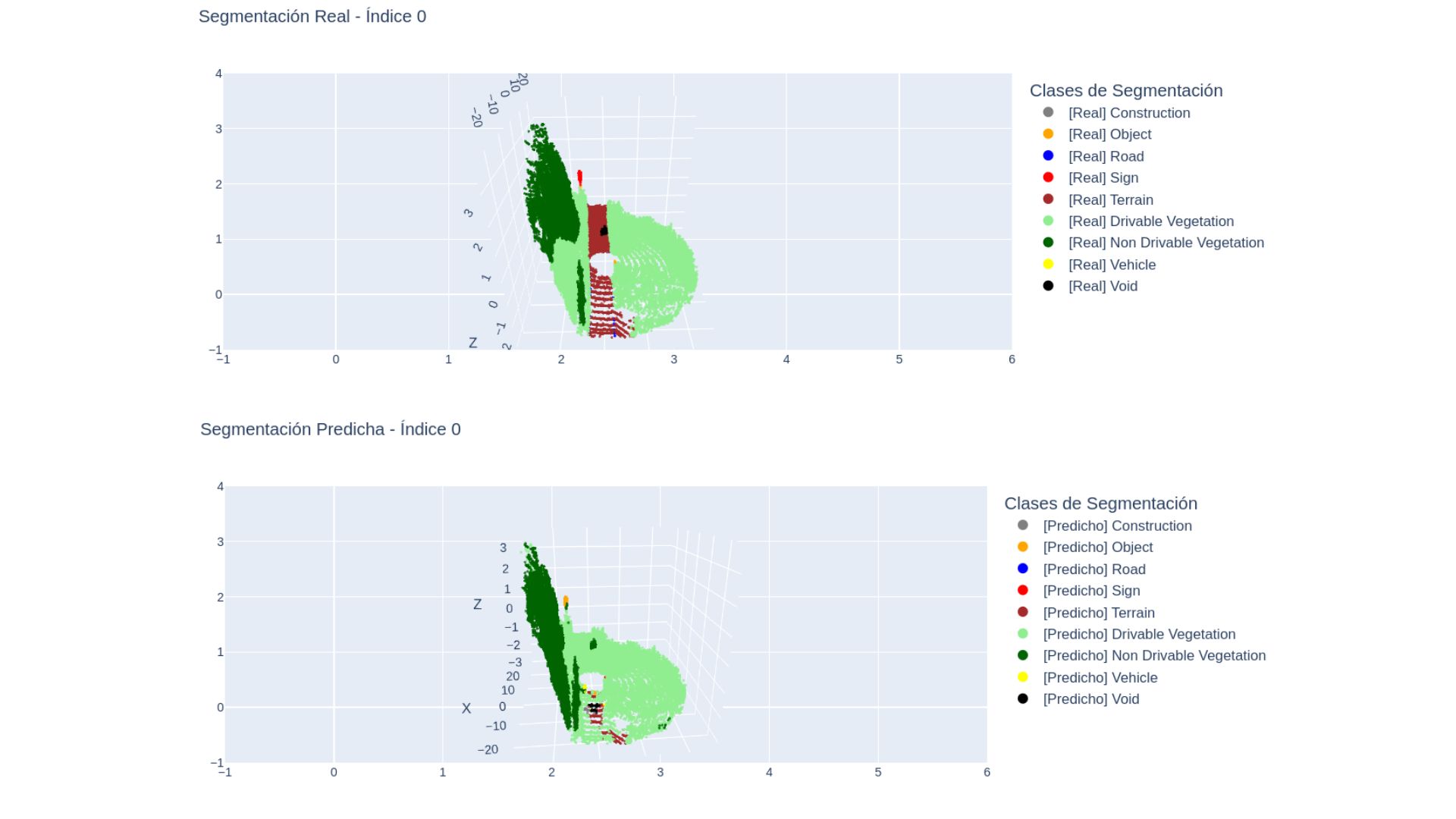
A continuacion se muestran ejemplos de la segmentacion semántica de algunas prubas hechas con las nubes de test modificadas.