Semana 3. Visor 3d para datos Lidar
En esta tercera semana, trabajaré en la modificación del visor 3d, desarollado la semana pasada, para poder visualizar los datos Lidar de la base de datos RELLIS-3D. El visor utilizado para esta modificación, será el que realizó la semana pasada el compañero Felix Martínez.
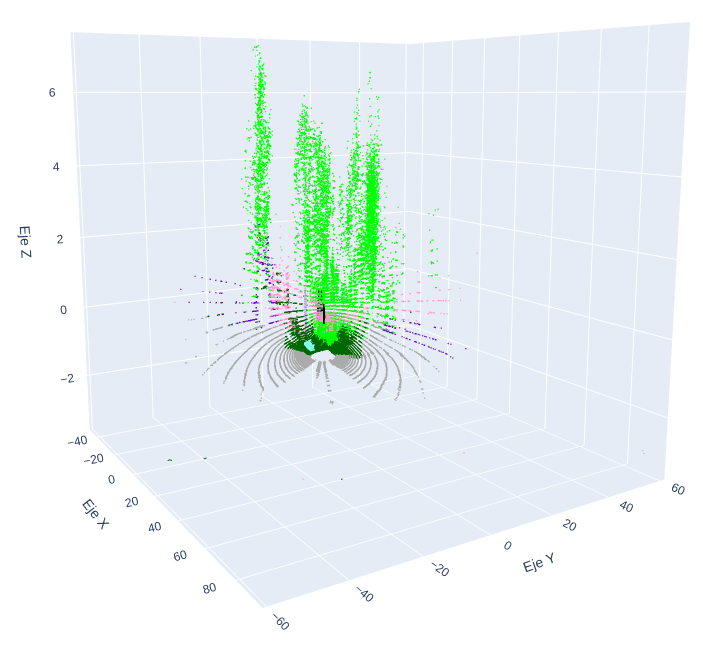
La modificación realizada consiste en cambiar los puntos generados aleatoriamente y mostrar los datos que ofrece RELLIS-3D.
Para obtener los datos de RELLIS utilizaré la libreria open3d, que permite leer los archivos .ply y posteriormente obtener de estos archivos las coordenadas y los colores de cada punto.
# Leer el archivo .ply usando Open3D
cloud = o3d.io.read_point_cloud("frame000001-1581624652_871.ply")
# Extraer las coordenadas x, y, z
points = np.asarray(cloud.points)
# Extraer los colores RGB
colors = np.asarray(cloud.colors)
Los puntos y colores obtenidos seran los utilizados para generar el gráfico con plotly.
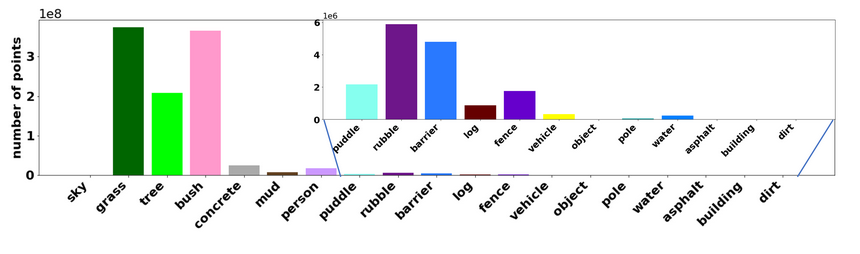
RELLIS-3D ofrece los datos del lidar ya segmentados de la siguiente manera: