
Semana 5. Visor Lidar con pygame
Esta semana he trabajado en Carla. Primero estuvefamiliarizandome con el simulador probando escenarios vehiculos y sensores.
Una vez conocido el funcionamiento del simulador, me he centrado en realizar un visor utilizando pygame que permite ver el resultado capturado por el sensor Lidar mientras un vehiculo circula por el mapa.
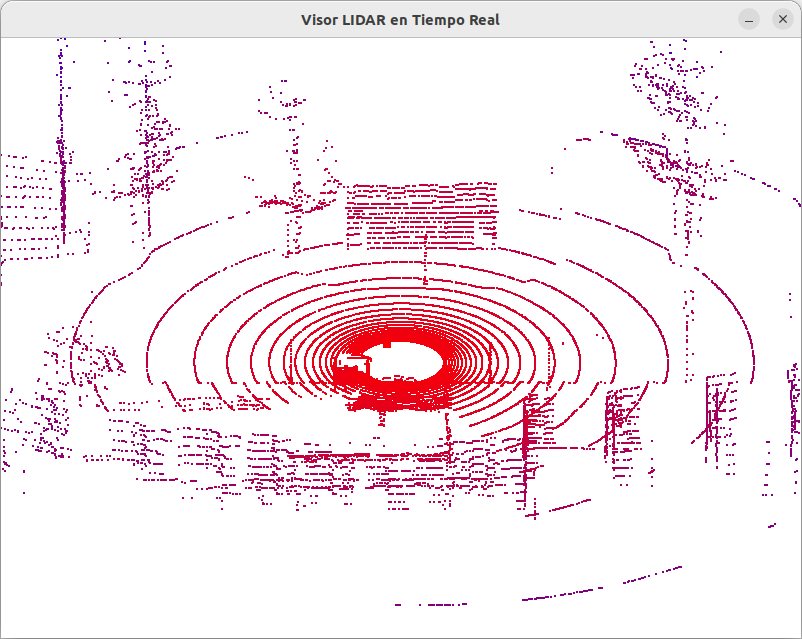
Aunque he conseguido visualizar en tiempo real los datos que se obtienen del sensor Lidar, no he conseguido una configuración con la que se distingan correctamente los obstáculos.