Testing RLidar and Configurations
Index
Using RLIDAR
Some of the RLIDAR tests will be shown as the output of the array hits:
hits:
1
2
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 0, 1, 0, 1, 1, 1, 0, 0, 0, 1, 1, 1, 0, 1, 0, 1, 1, 1, 1, 1, 1, 1, 1, 1, 0, 0, 1, 1, 1, 1, 0, 1, 0, 1, 1, 1, 0, 1, 0, 1, 1, 1, 0, 0, 0, 1, 1, 1, 0, 1, 1, 1, 1, 1, 0, 1, 0, 1, 1, 1, 1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 1, 1, 0, 0, 1, 1, 1, 1, 0, 1, 1, 1, 1, 1, 0, 0, 0, 1, 1, 1, 1, 0, 0, 1, 1, 1, 0, 0, 1, 1, 1, 1, 0, 0, 1, 1, 1, 1, 1, 0, 0, 1, 1, 1, 0, 0, 1, 1, 1, 1, 1, 1, 0, 1, 1, 1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 1, 1, 1, 1, 0, 1, 1, 1, 1, 1, 1, 0]
The obstacle is supposed to be directly in front, with the agent having an orientation of -pi/2
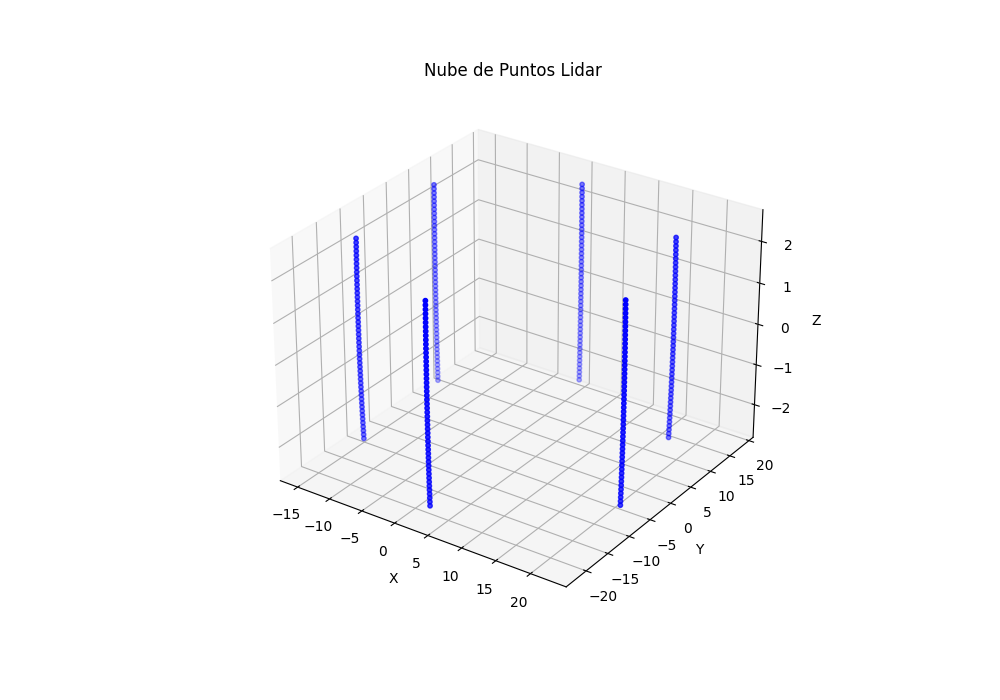
Here is a graphical representation of the ray_vectors array:
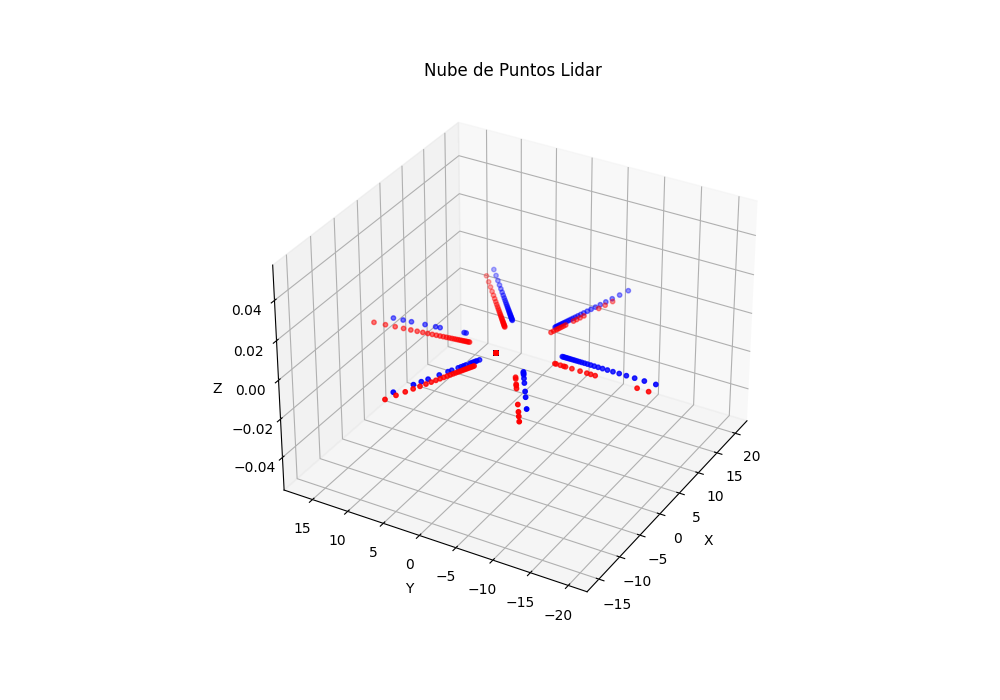
Here is a graphical representation of an obstacle at 3 metres on the x-axis and another at 5 metres:
Configuring enviroment
After searching for information I have discovered that it is not possible to add other agents to the scenario, once it has been launched, nor to modify the initial speed or position of our agent.
On the other hand, to do so, you have to directly modify the scenario configuration, where you can add agents, configure their routes, initial speeds and positions.
Example of initial speed:
1
2
3
4
5
normal = TrafficActor(
name="car",
depart_speed=0,
speed=Distribution(mean=1, sigma=0.2),
)
Example of initial pos:
1
2
3
4
5
6
EndlessMission(
begin=("E0", 1, 8),
entry_tactic=TrapEntryTactic(
start_time=20, wait_to_hijack_limit_s=0, default_entry_speed=0
),
)
This post is licensed under CC BY 4.0 by the author.