Testing & Configuring RLidar
Index
Testing RLidar
After further testing, it has been determined that the sensor is detecting the ground, then an image of the lidar beams will be displayed. These were ALWAYS detecting the ground as the y-axis goes from -2 to 2.
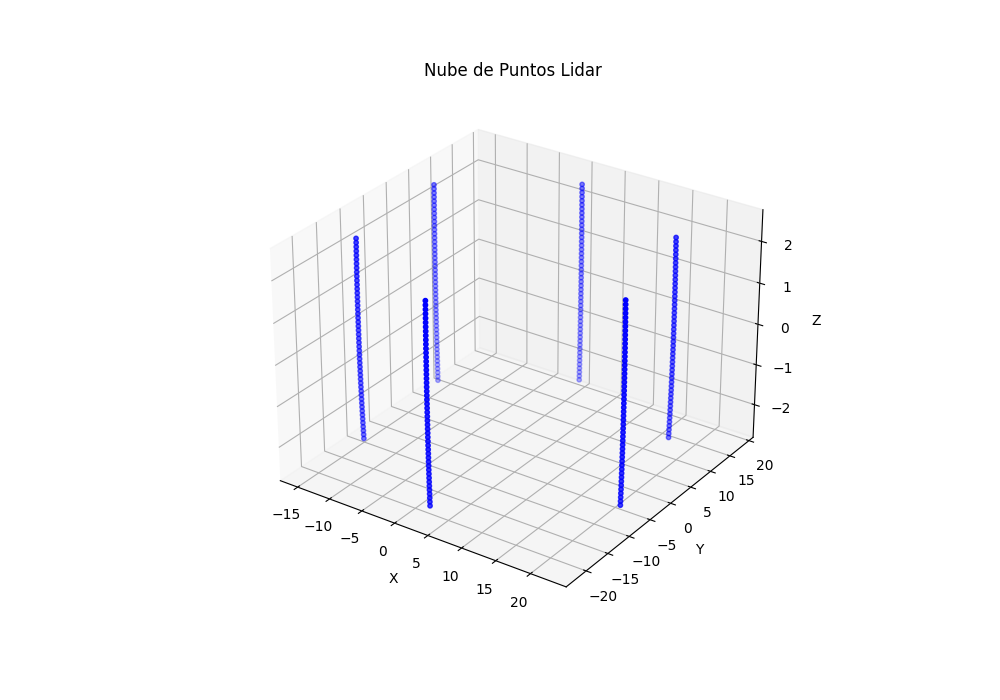
It now remains to determine why other vehicles are not being detected.
Configuring RLidar
The lidar sensor has been debugged to check its correct operation, after verifying it and inspecting all the libraries related to its operation or configuration, the file: lidar_sensor_params.py has been found.
This file contains the basic lidar configuration. The maximum detection distance, the resolution of the lidar and even the tilt in the y-axis. It has been modified in this way:
1
2
3
4
5
6
7
8
9
BasicLidar = SensorParams(
start_angle=0,
end_angle=2 * np.pi,
laser_angles=np.linspace(-np.radians(0.01), np.radians(0.01), 1),
angle_resolution=0.02094,
max_distance=20,
noise_mu=0,
noise_sigma=0.078,
)
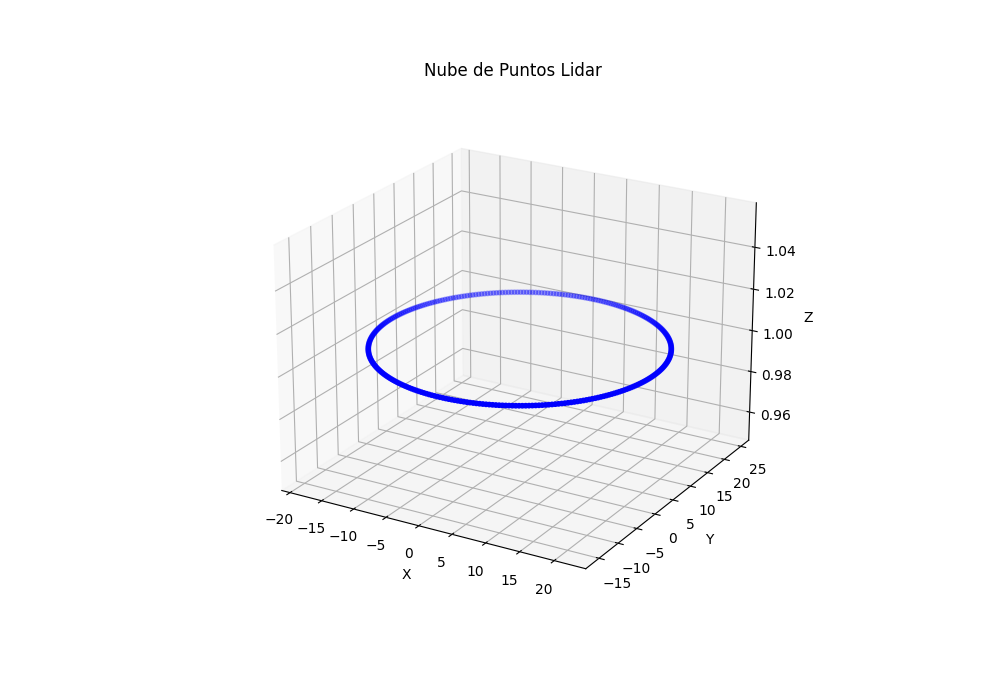
And these are the results of the new ray vectors:
This post is licensed under CC BY 4.0 by the author.