Developing a new demo
The objective for this week was to create a new and more complex demo using BT Studio and Gazebo Fortress.
Downloading Gazebo Fortress
You may follow the guide from Gazebo to install Gazebo Fortress with Humble.
This version at the very least did not get uninstalled every time I used rosdep but the problem is that the kobuki package that I use for the simulation uses Gazebo Classic, so there is the need to change it Fortress.
Demo
The objective for this demo is to recreate a basic competition challenge: recepcionist.
For the full explanation please go to this post.
Why this challenge?
I chose this challenge because I had already done it in C++ and more importantly because it uses a broad number of ros features:
- Actions: Integration with nav2
- Other packages: For example Yolo or DialogFlow
- Tf
Progress
As this week was very busy in University I tried to just get one part done.
At first I tried with the integration of Yolo but because of a problem with the imports packages I desisted.
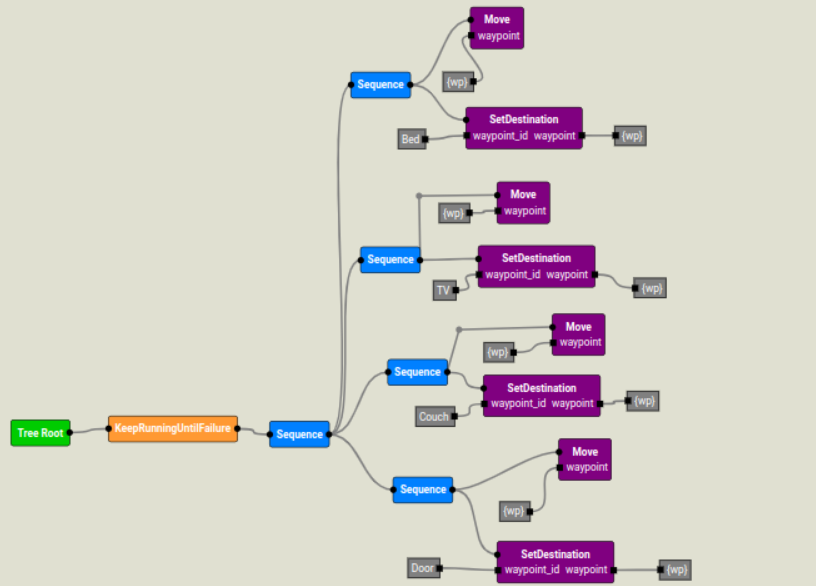
So the next part was the integration with Nav2, and after a little bit of suffering and a bit of jankiness I got it to work. As only this part cannot be consider a recepcionist I rename it to patrolling because that is what it does, it goes from one point to another indefinitely.