Autopiloto
Una vez habituados con las funciones básicas de CARLA y realizado el teleoperador, continuamos explorando otras funcionalidades proporcionadas por CARLA que necesitaremos posteriormente.
Índice
Traffic manager
Hemos implementado una función llamada traffic_manager para controlar el tráfico de vehículos. Esta función activa el piloto automático en los vehículos proporcionados como entrada, para su correcto funcionamiento, es necesario habilitar el modo síncrono al configurar CARLA. Además, hemos definido varios parámetros para controlar la conducción y la relación entre los diferentes vehículos.
tm.set_global_distance_to_leading_vehicle(2.0)
tm.global_percentage_speed_difference(speed)
LIDAR
Para visualizar adecuadamente los datos del láser, hemos desarrollado una nueva clase Lidar heredada de la clase Sensor. Al igual que en la implementación de la cámara, hemos agregado nuevos parámetros en el constructor para la visualización y sobrescrito la función process_data(). Esta función se encarga de visualizar el láser y actualizar las estadísticas relevantes a la zona frontal del láser, las cuales nos serán útiles para la detección de obstáculos. El parámetro time_show determina si los datos del sensor láser deben actualizarse de forma continua o una vez por segundo.
class Vehicle_sensors:
def add_lidar(self, size_rect:tuple[int, int]=None, init:tuple[int, int]=None, scale:int=25, time_show=True,
transform:carla.Transform=carla.Transform(), front_angle:int=150, show_stats:bool=True)
class Lidar(Sensor):
def __init__(self, size:Tuple[int, int], init:Tuple[int, int], sensor:carla.Sensor, time_show=True,
scale:int, front_angle:int, yaw:float, screen:pygame.Surface, show_stats:bool)
def process_data(self)
def get_stat_zones(self)
def get_meas_zones(self)
def set_i_threshold(self, i:float)
def get_i_threshold(self)
def set_z_threshold(self, z:float)
def get_z_threshold(self)
En primer lugar, es necesario transformar los datos del láser en una matriz de matrices, donde cada submatriz almacena las coordenadas x, y, z y la intensidad respectivamente. Cada una de estas submatrices representa un punto.
lidar_data = np.copy(np.frombuffer(self.data.raw_data, dtype=np.dtype('f4')))
lidar_data = np.reshape(lidar_data, (int(lidar_data.shape[0] / 4), 4))
Visualización
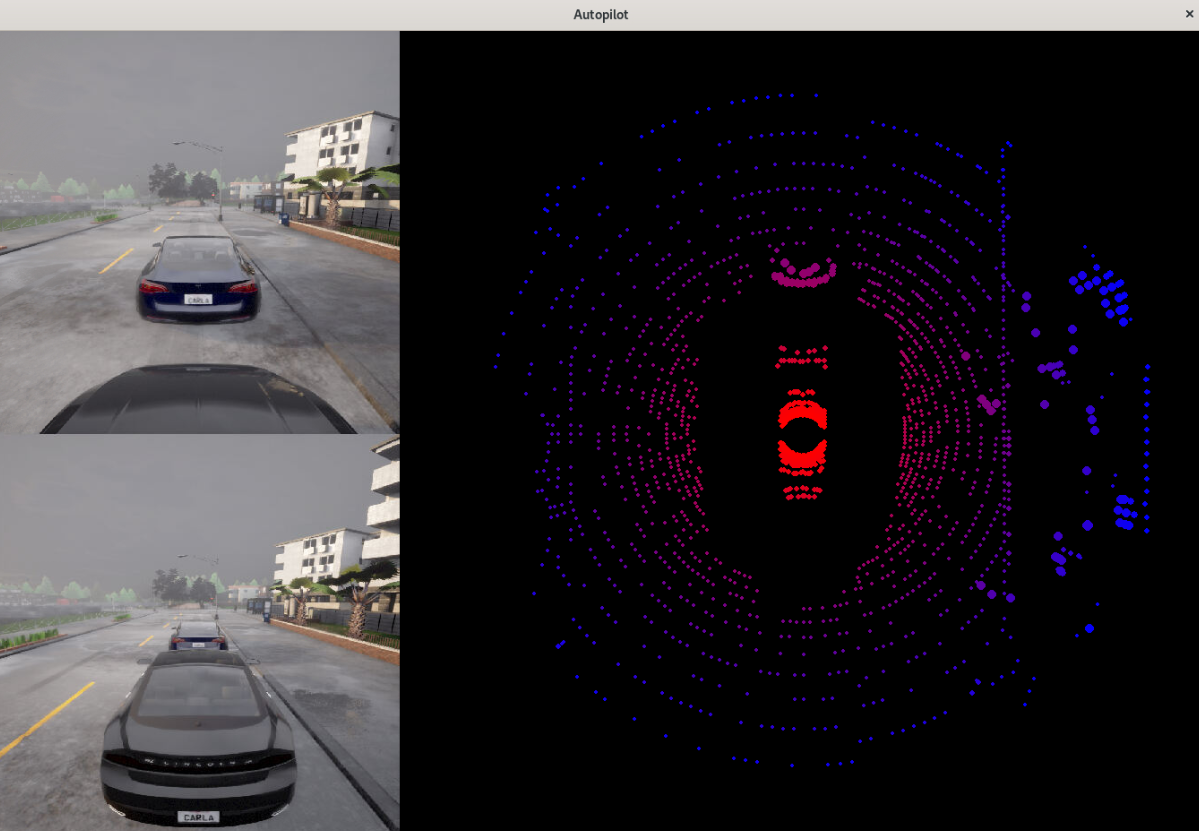
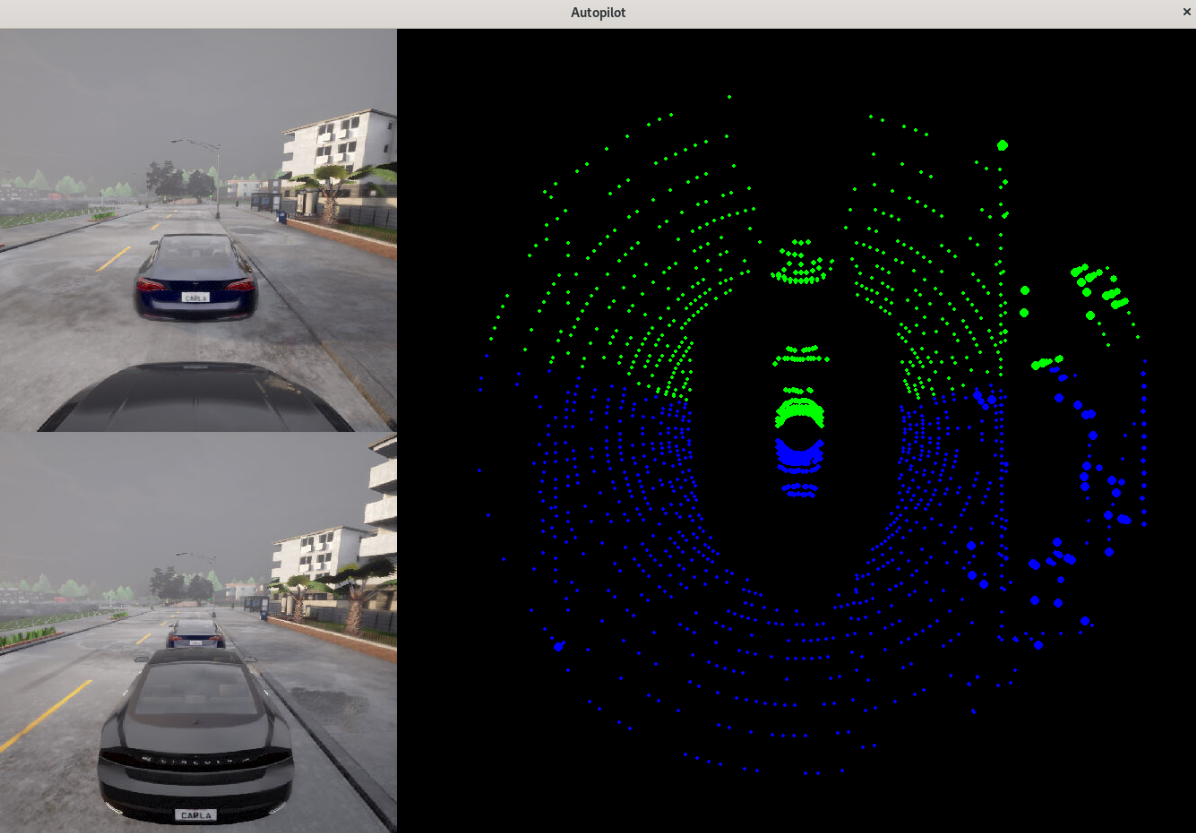
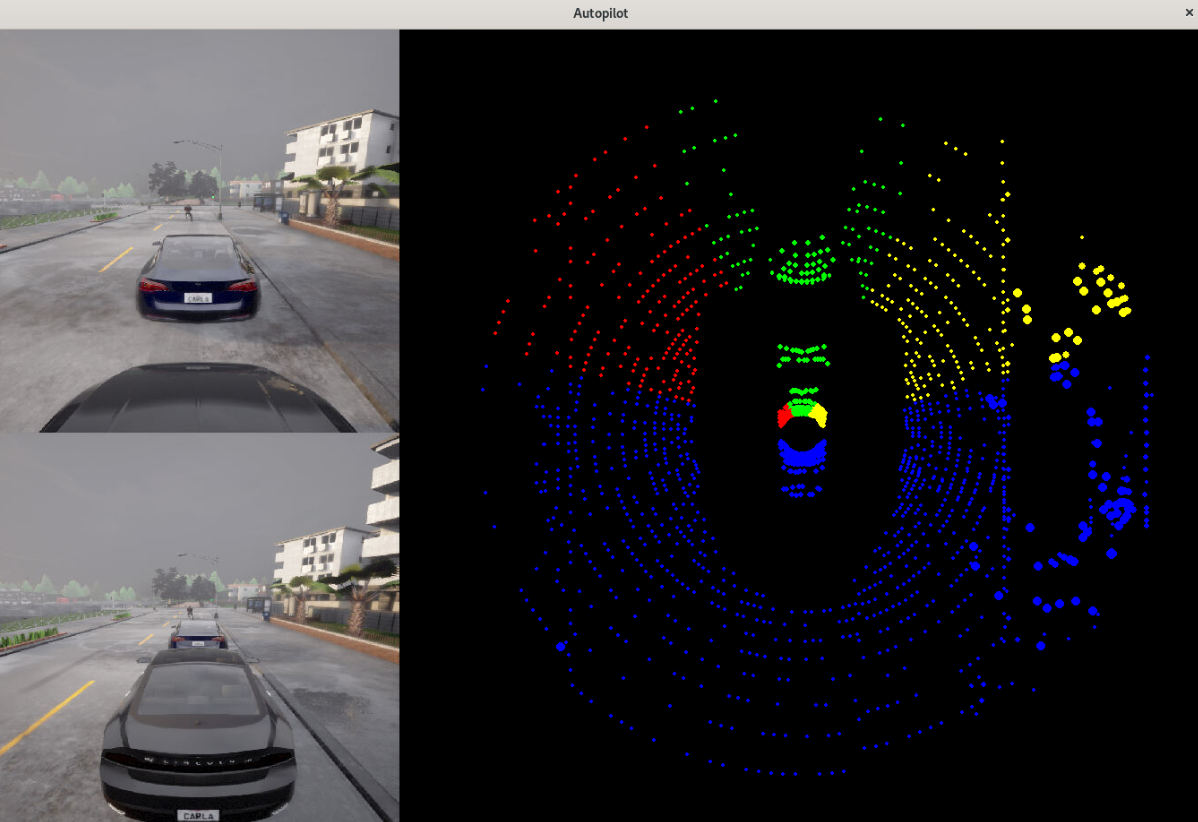
Para la representación del láser, dibujamos cada unos de estos puntos en 2D (x, y). Para mejorar la percepción visual, hemos interpolado el color de cada punto según su intensidad y el tamaño según su altura.
Zona frontal
Con el fin de realizar adelantamientos, nos enfocaremos en la detección de obstáculos en la parte frontal del vehículo. Por lo tanto, examinaremos el ángulo frontal del láser, cuya amplitud es indicada por el usuario, por defecto es 150º.
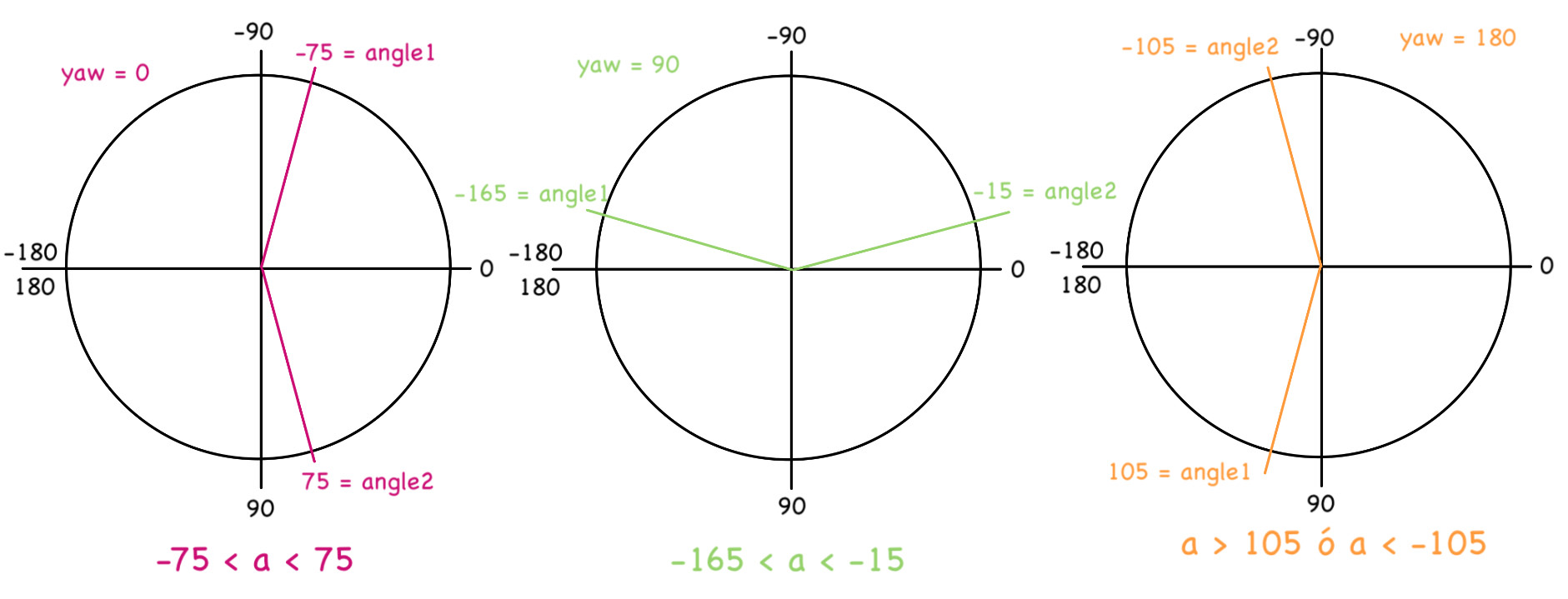
En primer lugar, debemos determinar los ángulos límite que delimitan esta zona frontal, teniendo en cuenta la rotación del láser yaw. Partimos de un supuesto yaw = 0, al cual sumamos el yaw real y finalmente lo acotamos en un rango de [-180º, 180º].
angle1 = -front_angle / 2 + yaw
angle2 = front_angle / 2 + yaw
Como se puede observar en el siguiente dibujo, dependiendo de que ángulo sea mayor, debemos seguir un criterio u otro para determinar si un punto pertenece o no la zona de interés.
Dividimos este ángulo frontal en tres zonas: la parte izquierda (front-left), central (front-front) y derecha (front-right), asignándoles los índices 0, 1 y 2 respectivamente. Aunque ya hemos encontrado los ángulos extremos, es necesario calcular los dos ángulos intermedios que delimitan las tres zonas. Estos cuatro ángulos se almacenan en una lista angles, la cual es un atributo de la clase Lidar.
angle1_add = angle1 + front_angle / 3
angle2_sub = angle2 - front_angle / 3
angles = [angle1, angle1_add, angle2_sub, angle2]
Para establecer en qué zona se encuentra cada punto, seguimos el criterio mencionado anteriormente:
if angles[i] <= angles[i + 1]:
return angles[i] <= a <= angles[i + 1]
else:
return angle[i] <= a or a <= angle[i + 1]
En nuestro caso, con un yaw de 90º, obtendríamos los ángulos: [-165.0, -115.0, -65.0, -15.0].
Cálculo de estadísticas
Creamos una lista de dos elementos meas_zones. El primer elemento de esta lista a su vez contiene tres listas, cada una contiene las distancias desde el punto hasta el centro del láser en el plano XY de cada zona. El segundo elemento, guarda de la misma manera las alturas z. Utilizamos estas medidas para calcular la media, la mediana, la desviación estándar y el mínimo en cada zona, stat_zones. Actualizamos las estadísticas en cada iteración, pero, si deseamos visualizarlas en pantalla, su valor se actualiza cada segundo.
Como se puede observar en la imagen, los puntos de color rojo corresponden al propio coche, por lo tanto, hemos realizado un filtrado por intensidad para eliminarlos del cálculo estadístico. Este umbral tiene un valor predeterminado establecido en el constructor, pero hemos implementado unas funciones para consultar o modificar su valor. De manera similar, para calcular el mínimo, filtramos por altura para eliminar todos los puntos correspondientes a la calzada.

Histogramas
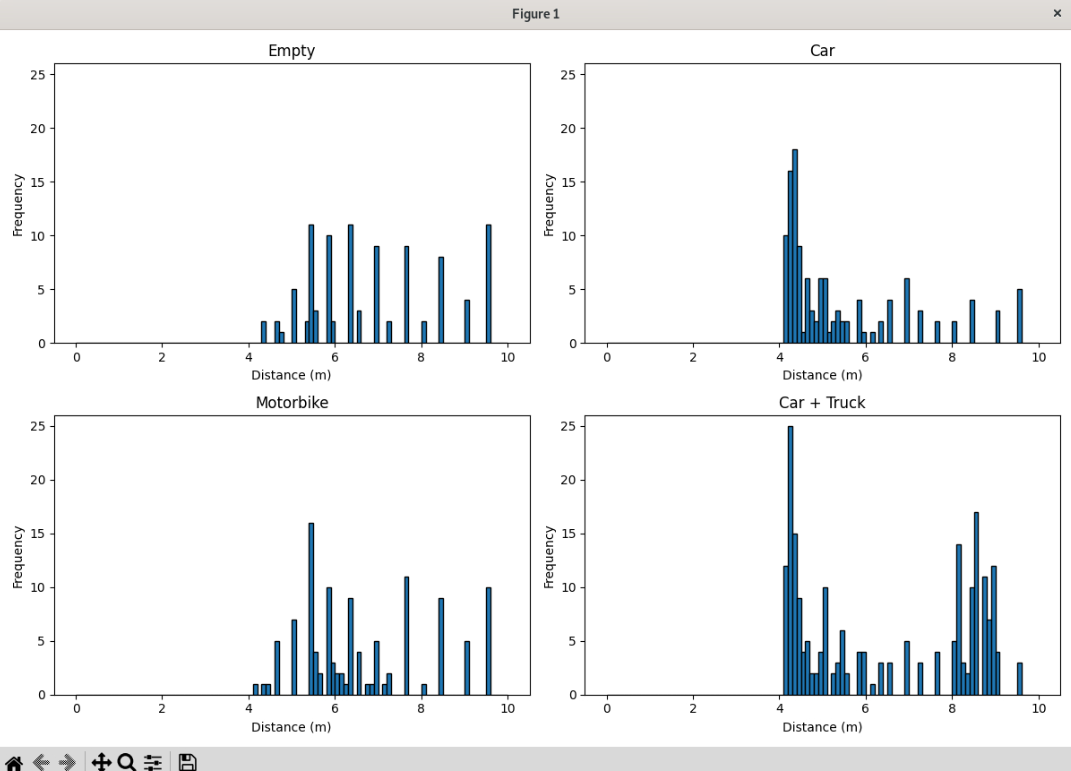
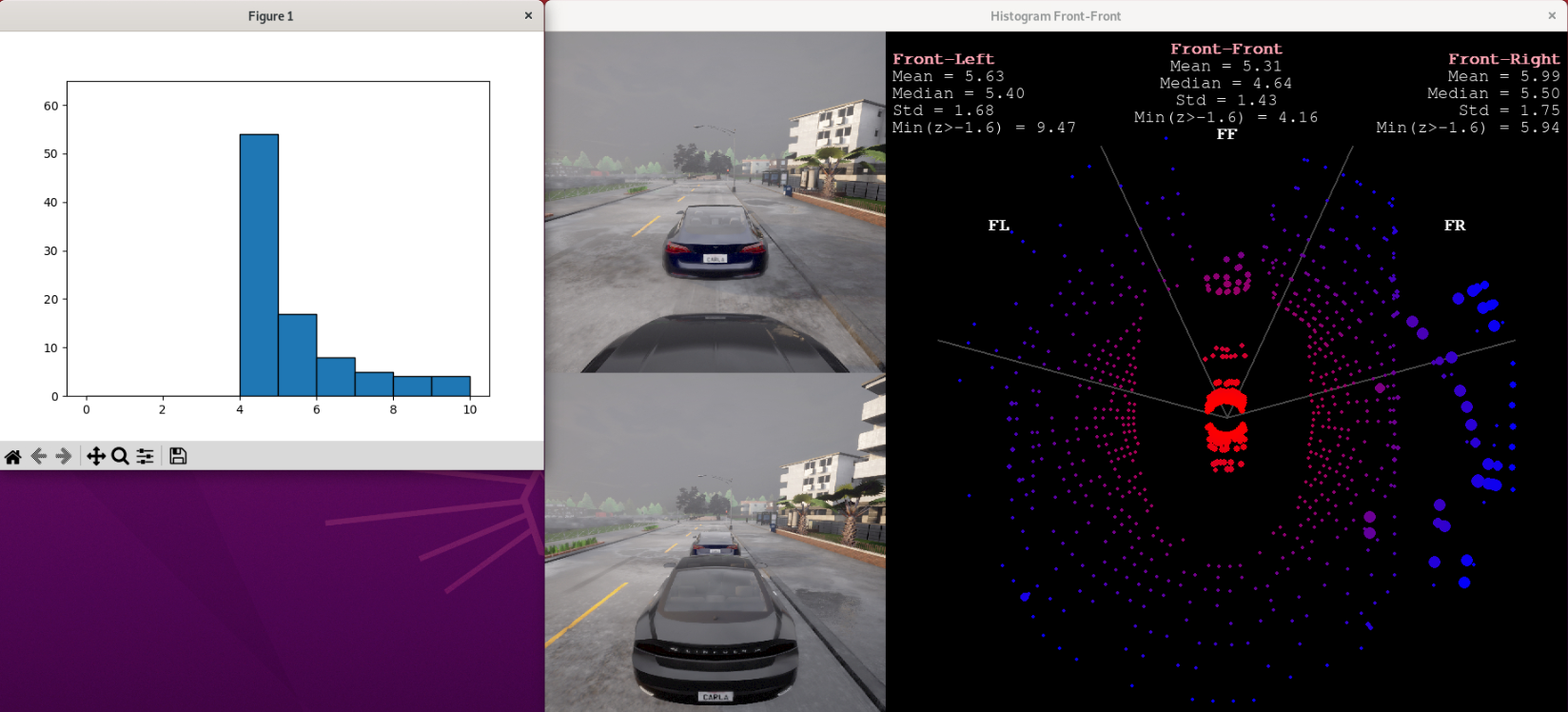
Vamos a generar histogramas utilizando las distancias detectadas en la zona central frontal del vehículo, con el objetivo de distinguir la presencia de obstáculos y las distancias a las que se encuentran.
- En un escenario sin obstáculos, observamos que no hay ningún valor que sobresalga entre los demás.
- Cuando hay un coche delante, notamos cómo se dispara la columna que representa el rango de distancia de 5-6 metros, lo cual concuerda con la medida mínima detectada.
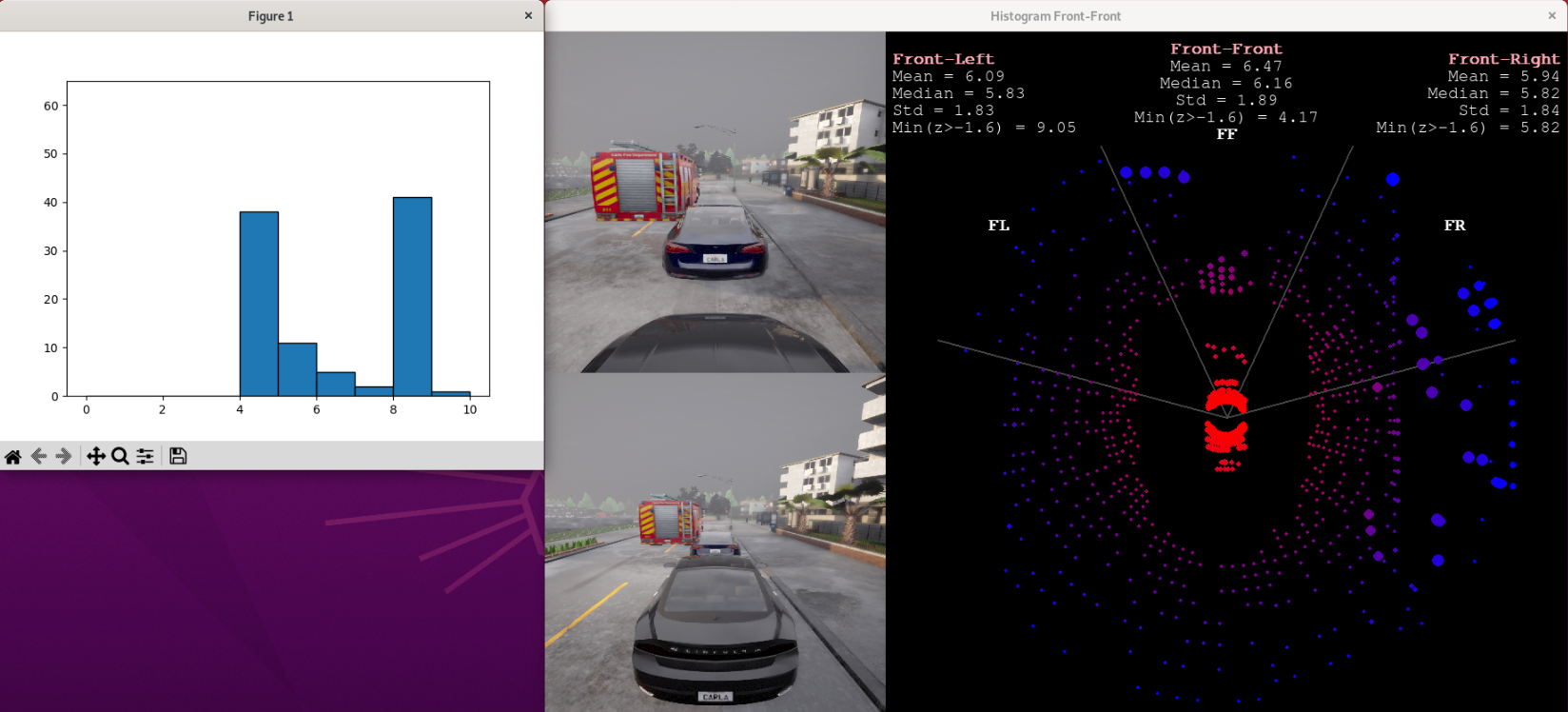
- Si añadimos un camión a la izquierda, observamos que las medidas en el rango de 8-9 metros aumentan considerablemente. Hay dos columnas que sobresalen sobre las demás, indicando la presencia de dos obstáculos.
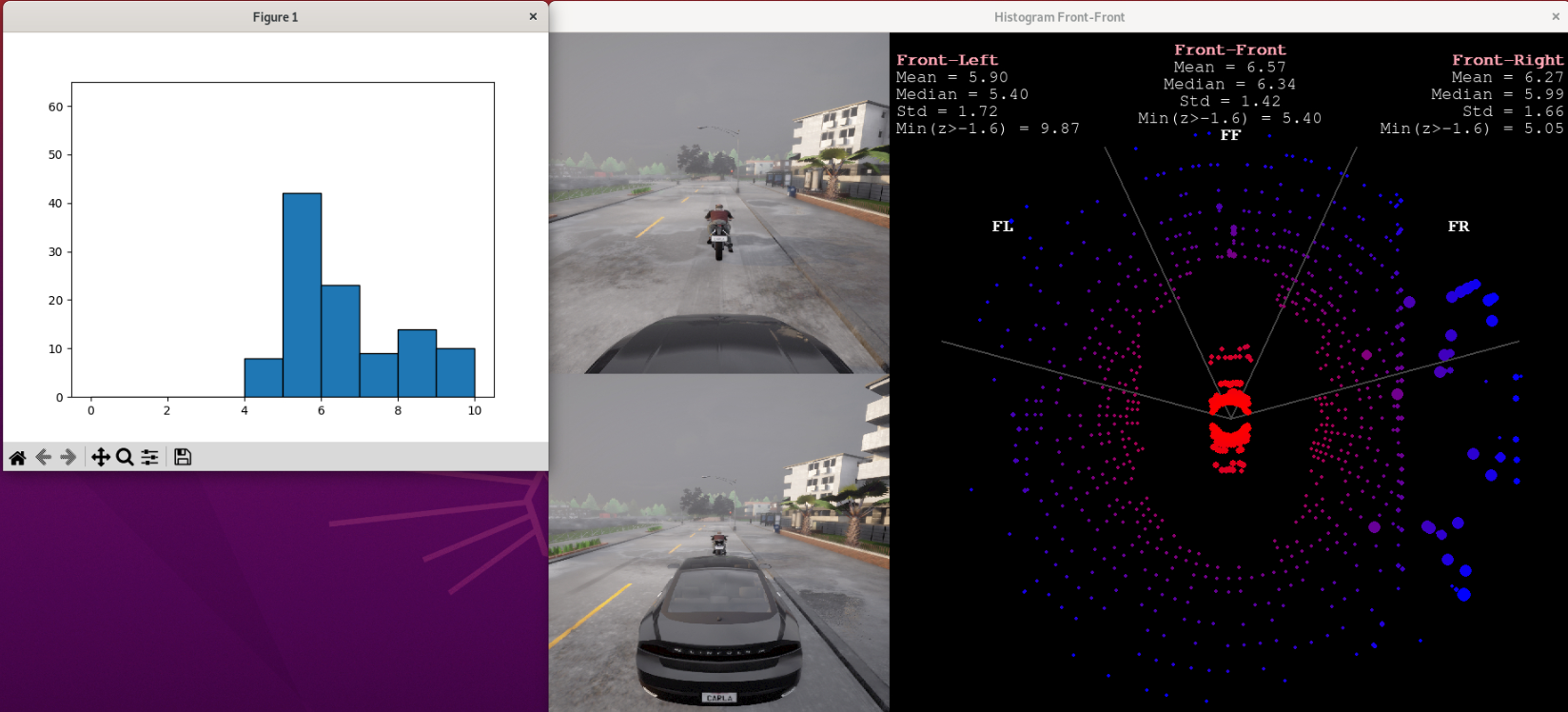
- En el caso de tener una moto delante, el cambio en los valores no es tan significativo como en el caso del coche, dado que es de tamaño menor. Sin embargo, el cambio es lo suficientemente notable respecto al escenario vacío como para detectar la presencia de la motocicleta.
Hemos creado una aplicación llamada carla_hist.py para recopilar los datos del láser y almacenarlos en formato csv (hist_data.csv). Al presionar la tecla s, se guardan los datos en el fichero csv, mientras que al presionar la tecla x, se puede cambiar la configuración en la disposición de los vehículos. Este fichero acepta el argumento w para sobrescribir el csv existente, a para añadir al final del archivo csv y n para no guardar los datos. Además, hemos creado un script para visualizar los plots de estos datos (plot.py):
python3 carla_hist.py --mode w
python3 plot.py