Sigue carril: PID
Implementaremos una solución combinando múltiples redes neuronales para detectar el carril y calcular la desviación del vehículo respecto al mismo. Esta información se enviará a un controlador PID para corregir la desviación y mantener el vehículo en el centro del carril. Utilizaremos el modo asíncrono de CARLA ya que es el que mejor se ajusta al mundo real.
Índice
Detección de carril
A partir de la ubicación del vehículo y de la cámara en Carla, podemos llevar a cabo la detección del carril. Contamos con la transformación del vehículo a la cámara, lo que, junto con la posición del vehículo, nos permite obtener los límites del carril en 3D (visión global en Carla). También disponemos de la matriz intrínseca K, que convierte las coordenadas de 2D a 3D; al utilizar esta matriz, podemos proyectar esos límites a 2D. Para implementar esta funcionalidad, hemos añadido nuevos parámetros al sensor de la cámara:
def __init__(self, size:tuple[int, int], init:tuple[int, int], sensor:carla.Sensor,
text:str, screen:pygame.Surface, seg:bool, init_extra:tuple[int, int],
lane:bool, transform:carla.Transform, vehicle:carla.Vehicle, world:carla.World):
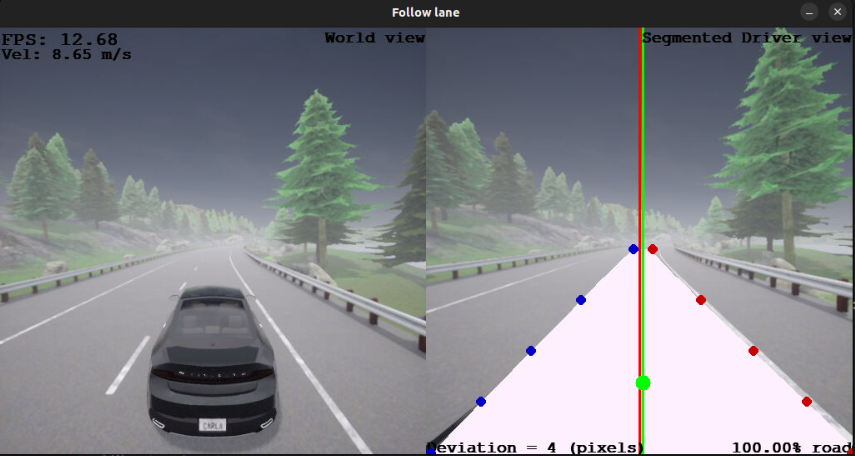
Utilizamos la función pygame.draw.lines para obtener los puntos que definen los límites el carril. Esta función devuelve el rectángulo dentro del cual se ha dibujado la línea, pero no los puntos de la línea en sí. Por ello, dibujamos la línea sobre una superficie negra y luego examinamos dicha superficie para localizar los límites del carril en píxeles. Para optimizar el rendimiento computacional, revisamos únicamente dentro de los límites del rectángulo y, en cuanto encontramos un punto, detenemos la búsqueda, ya que, al dibujar una línea continua, sabemos con certeza que hay un punto en cada altura y.
Dado que tenemos los dos límites en cada altura del carril, podemos dibujarlo y calcular su área de manera sencilla. Además, determinamos su centro de masas, lo que nos permitirá calcular la desviación del carril. Usaremos estos datos para seguir el carril utilizando un controlador o un algoritmo de DRL.
class Camera(Sensor):
def get_lane_cm(self)
def get_lane_area(self)
def get_deviation(self)
def process_data():
for i in range(len(self._lane_left)):
img[y, x_left:x_right] # Píxeles que pertenecen al carril en cada altura (y)
Red neuronal de detección de carril
Contamos con una red neuronal para detectar el carril, la cual nos proporciona dos máscaras que definen cada una de las líneas del mismo. Para mejorar la detección, especialmente en casos de líneas discontinuas o cuando la red neuronal proporciona líneas fragmentadas o incompletas, empleamos regresión lineal en los puntos obtenidos para cada línea a través de la red. Este procedimiento nos permite calcular los coeficientes de las rectas que mejor se ajustan a dichos puntos.
Hemos definido una altura máxima para la detección del carril, creando así la forma de un trapecio. Los puntos que se encuentren dentro de este trapecio delimitado pdefinen el área del carril. Además, hemos integrado una función de seguridad: si perdemos el seguimiento de una de las líneas del carril durante varias iteraciones consecutivas o perdemos ambas líneas del carril, detenemos la ejecución del programa. En casos donde no se detecten líneas, volvemos a utilizar la última medida válida.
Para filtrar mediciones erróneas, hemos implementado una memoria que guarda las cinco últimas detecciones de las líneas, junto con el ángulo que cada una forma con la horizontal. Si el ángulo de la detección actual difiere lo suficiente de la media de los ángulos almacenados en esta memoria, descartamos la medida y empleamos la última detección válida. Estas mediciones incorrectas también se consideran al evaluar si hemos perdido el carril.
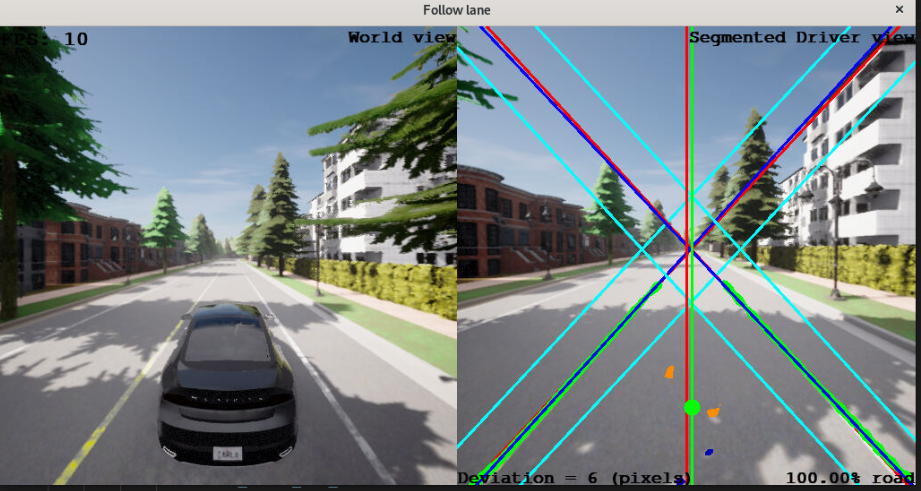
Para eliminar los outliers de cada máscara, solo conservaremos los puntos que caen dentro de un umbral basado en la medida anterior. En la imagen siguiente, se muestra esta idea utilizando la siguiente codificación de colores:
- Las líneas rojas en forma de cruz representan las dos detecciones de cada línea carril anteriores.
- Las líneas cián que rodean a las anteriores delimitan la zona válida.
- Los puntos verdes son los puntos válidos que tendremos en cuenta para la detección del carril, mientras que los azules o naranjas son los outliers.
- Las líneas azules son el resultado de aplicar regresión lineal sobre los puntos válidos (verdes).
Red neuronal de segmentación semántica
Una vez que hemos determinado el área del carril, empleamos la red de segmentación para calcular el porcentaje de ese área que corresponde realmente a la carretera. Este cálculo nos permite discernir si hemos perdido el carril aunque continuamos detectando líneas, las cuales podrían ser, por ejemplo, de la acera. Si el porcentaje de área correspondiente al carril es inferior a un umbral durante varias iteraciones seguidas, detenemos la ejecución del programa. Esto será útil sobre todo en la próxima etapa, el seguimiento del carril mediante deep reinforcement learning. Después de realizar todas las verificaciones, determinamos el centro de masas del carril y evaluamos su desviación con respecto al centro de la pantalla en el eje x, donde se encuentra nuestro vehículo.
class Camera(Sensor):
def get_road_percentage(self)
Controlador PID
La desviación en el eje x representa el error que recibe nuestro controlador, el cual es principalmente un controlador PD para el giro del volante (steer). El componente proporcional normaliza el error en un rango de 0.0 a 1.0, que es el rango de control proporcionado por Carla. Sin embargo, si el error supera cierto umbral, lo incrementamos ligeramente para mejorar el rendimiento en las curvas. Respecto al componente derivativo, lo hemos incorporado para prevenir movimientos oscilatorios al salir de las curvas, ya que resta el error anterior reducido. Por lo tanto, solo consideramos el error anterior si su signo difiere del error actual, ya que, de lo contrario, podría afectar negativamente la conducción en las curvas.
En lo referente al control de los pedales, mantenemos el acelerador contante en 0.5, mientras que con el freno regulamos la velocidad para mantenerla en aproximadamente de 10m/s.
Profiling
Hemos dividido el código en secciones para evaluar las latencias y determinar dónde estamos consumiendo más tiempo en nuestro programa, con el objetivo de mejorar su eficiencia. Como se puede observar en la siguiente imagen, la mayor parte del tiempo se destina a realizar la prediccion con el modelo de segmentación. El resto de secciones presentan latencias acordes a su carga computacional, sin presenta una desventaja significativa para nuestro programa.
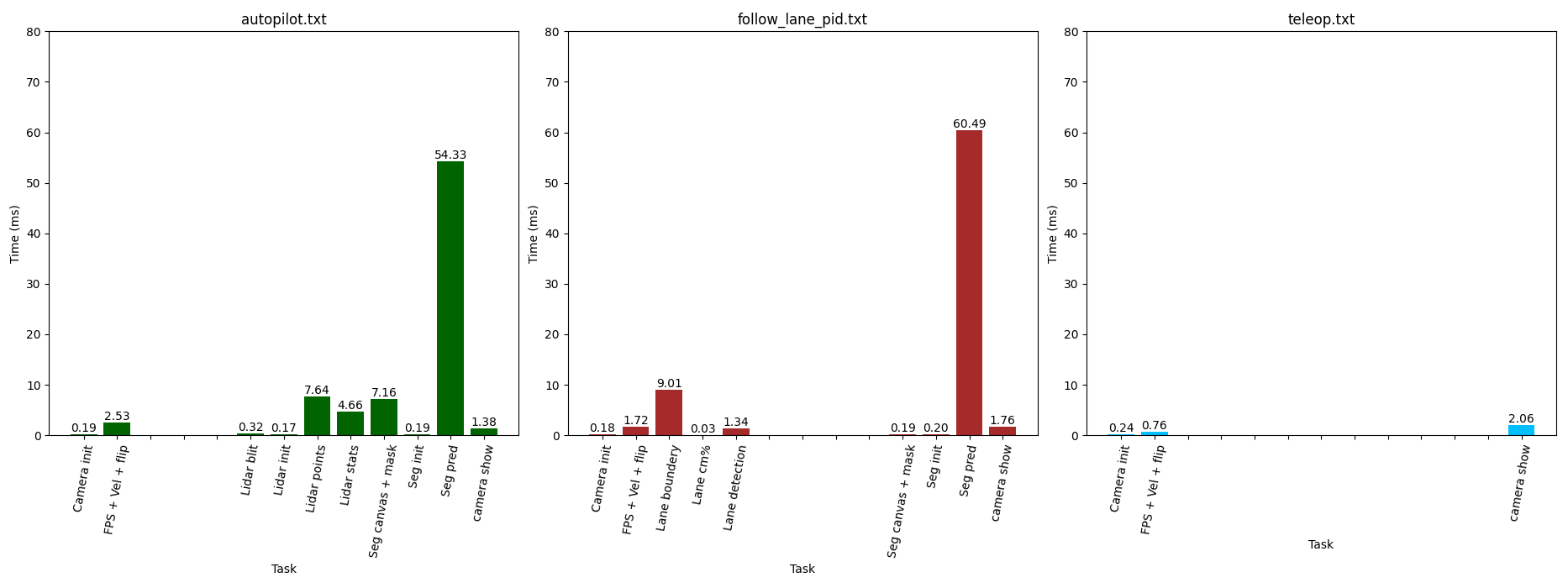
Como consecuencia de estos resultados, se ha decidido hacer opcional la funcionalidad de obtener el canvas con el color de cada píxel según indica la red de segmentación semántica (parámetro canvas_seg), dado que esta función solo es útil para la visualización. De esta manera, logramos mejorar la velocidad en el seguimiento del carril.
class CameraRGB(Sensor):
def __init__(self, size:tuple[int, int], init:tuple[int, int], sensor:carla.Sensor,
text:str, screen:pygame.Surface, seg:bool, init_extra:tuple[int, int],
lane:bool, canvas_seg:bool, transform:carla.Transform, vehicle:carla.Vehicle,
world:carla.World)
Puntos del carril
En la clase CameraRGB, hemos implementado una función que extrae un número específico de puntos en cada línea del carril y devuelve un np.array con sus coordendas (x, y). Dividimos la altura total del carril (eje y) en ese número de puntos, obteniendo así las coordenadas y, posteriormente calculamos las coordenadas x correspondientes a dichas alturas. Esta función está diseñada para ser utilizada en la siguiente etapa, donde entrenaremos un modelo de deep RL.
def get_lane_points(self, num_points:int=5, show:bool=False):
return [left_points, right_points]