Week 17 – Visor en vivo, cámara en alta y control por red neuronal -weekly Log
Visor en vivo y control con el modelo
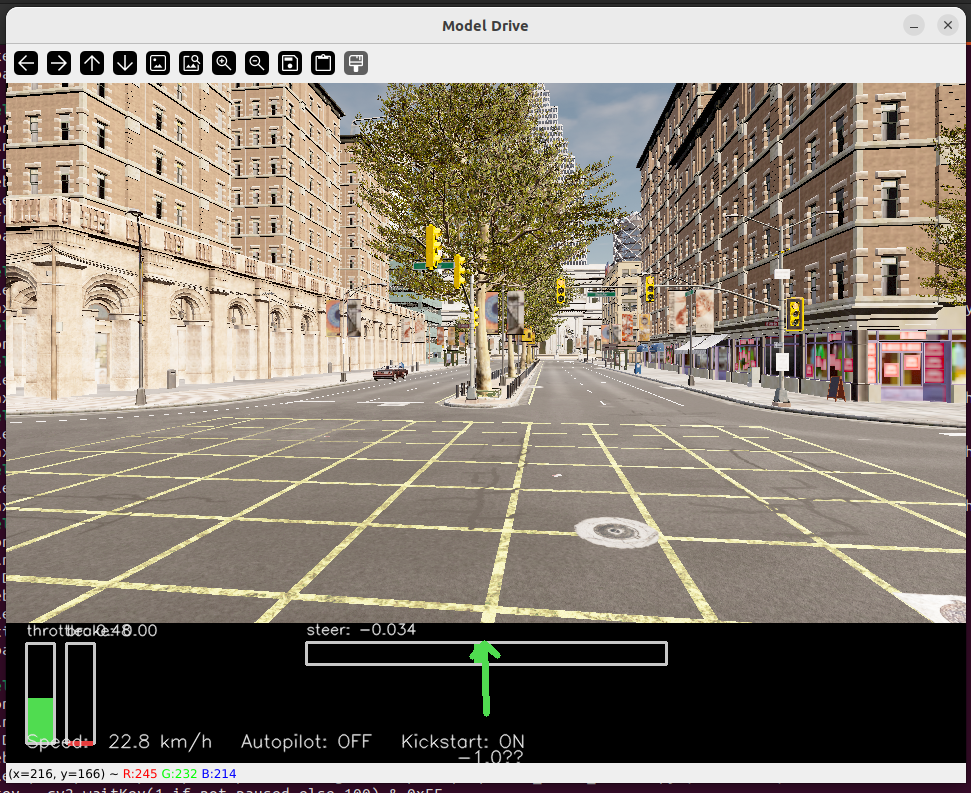
Se implementó un pipeline en vivo con la API de CARLA: cámara RGB en alta resolución para visualización, preprocesado a 200×66 para PilotNet y un HUD (steer, throttle, brake, velocidad). Se añadió kickstart para evitar que el coche se quede parado y controles rápidos (pausa/autopilot).
Entregables
visualize_drive.py: reproduce datasets con HUD.carla_live_viewer.py: cámara en vivo + HUD (autopilot opcional).model_drive.py: alta resolución para ver; 200×66 para inferencia + kickstart y suavizado de dirección.
Cambios clave
- Unificación de columnas (
frame, steer, throttle, brake). - Anti-stall (kickstart) y exclusión freno/acelerador simultáneos.
- HUD con barras y flecha de dirección; lectura de km/h.