Soy ingeniero en robótica, apasionado por los vehículos autónomos y el desarrollo de tecnologías inteligentes que impacten positivamente el mundo real.
Week 31 – Balanceo de dataset DAgger y despliegue de política MobileNet para seguimiento de carril
Trabajo realizado
Se revisó y ajustó el flujo completo para lane-following en CARLA con datos DAgger:
Dataset en CSV con separación explícita entre acciones del experto (expert_) y acciones aplicadas con ruido (applied_), incluyendo metadatos de ruido.
Entrenamiento supervisado en PyTorch con MobileNetV2 para regresión continua de controles.
Se confirmó que el dataset presenta un desbalance importante (muchas muestras con
steer
≈0), afectando la capacidad de corrección en curvas.
Se implementó un balanceo por bins de
expert_steer
, reduciendo rectas y conservando curvas, llevando el dataset de ~40k a ~15k muestras.
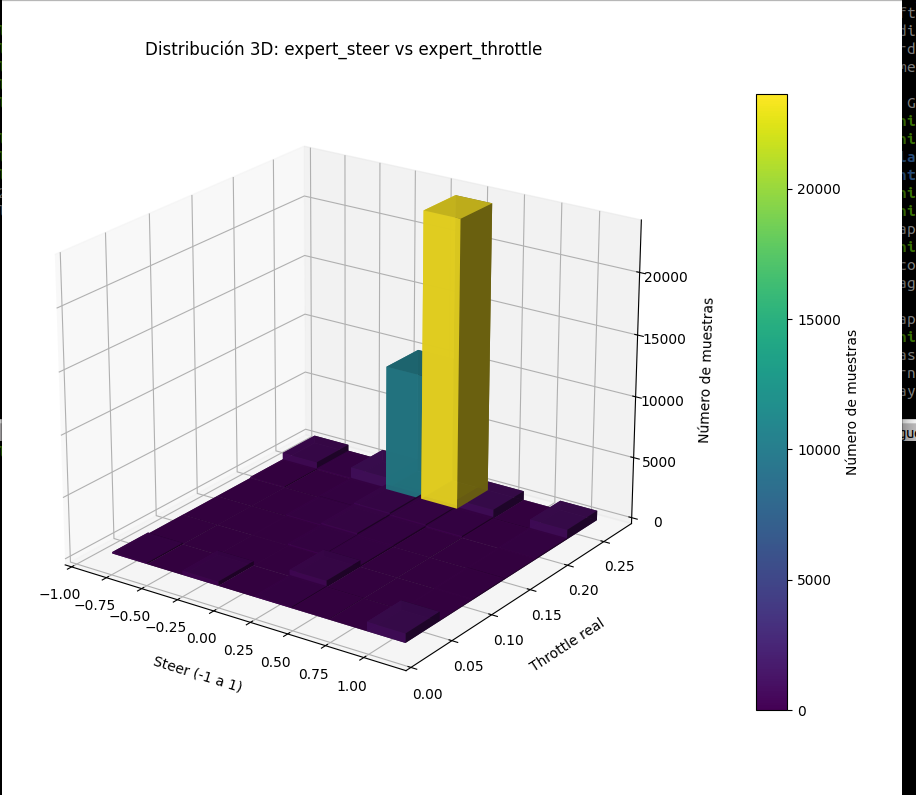
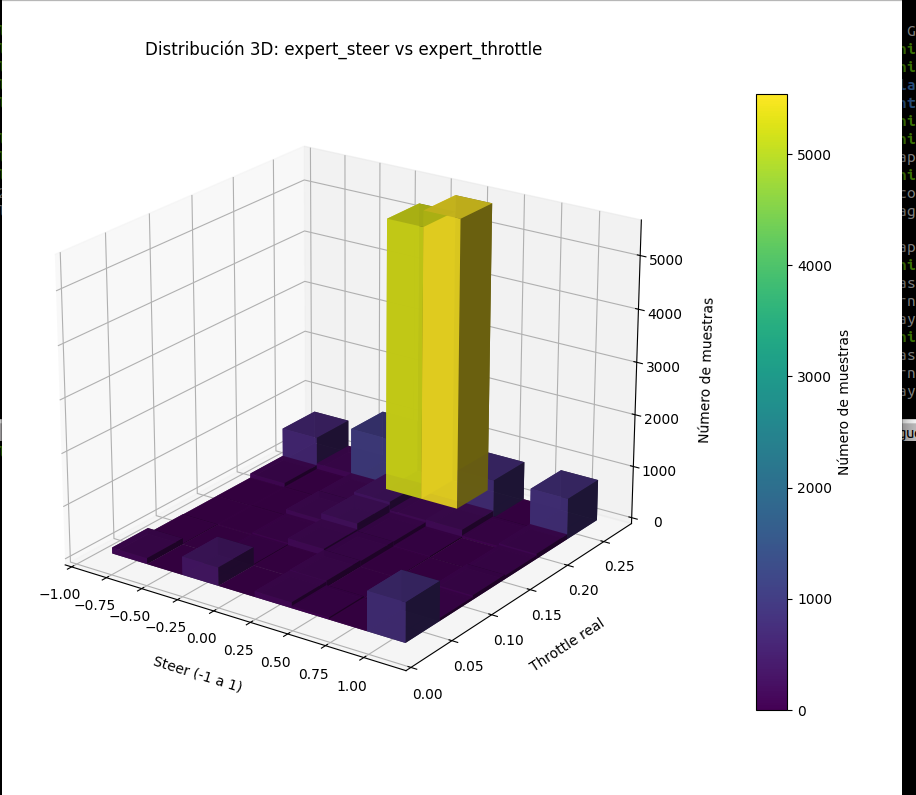
Se generó visualización 3D antes vs después (steer vs throttle) para verificar el efecto del balanceo.
Se configuró y depuró ejecución de BehaviorMetrics en Docker:
corrección de errores típicos (-v con rutas correctas, tag noetic, puertos VNC/Jupyter),
uso de cliente VNC en Ubuntu (Remmina) para visualizar la GUI del contenedor,
diagnóstico de dependencias Python (conflictos por versiones de albumentations y módulos faltantes al ejecutar drivers).
Visualizaciones
Antes del balanceo: alta concentración en steer cercano a 0.
Después del balanceo (~15k): menor peso de rectas y mayor representatividad de curvas.
GIF de referencia para documentación del modelo en ejecución (placeholder).