Week 32 – ROS Noetic/BehaviorMetrics en Docker y balanceo orientado a curvas para lane-following con DAgger
Week 32 – ROS Noetic/BehaviorMetrics en Docker y balanceo orientado a curvas para lane-following con DAgger
Trabajo realizado
- Se revisó el contexto de ROS/BehaviorMetrics a partir del material compartido por Carlos; el enlace compartido no fue accesible sin autenticación desde el navegador de esta sesión, por lo que se documenta únicamente lo que se trabajó y verificó durante la semana. :contentReference[oaicite:0]{index=0}
- Usé Ros Humble como base práctica para el stack de simulación.
- Hablando con Carlos me comento que la mejor forma de ejecutar Beheivior Metrics era desde una instalacion local, despues de varias iteraciones logre correr la interfaz, debo conectar aún esta con Carla con ROS bridge que es en lo que estoy trabajando.
Balanceo del dataset (énfasis en curvas)
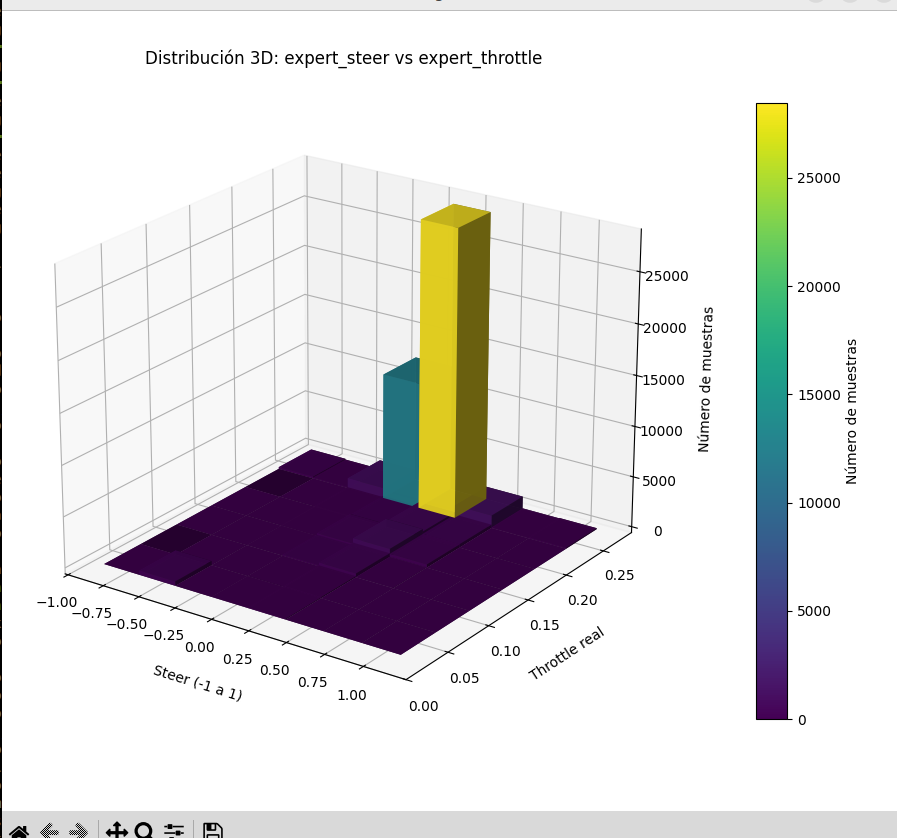
-Se grabo un nuevo dataset con 47000 muestras, este s hizo en town 12 que es el mas grande de carla y haciendo muchas mas curvas.
- Se tomó el dataset DAgger en formato labels.csv (acciones del experto y metadata de recolección) y se diseñó un balanceo orientado a maximizar la calidad en curvas:
-
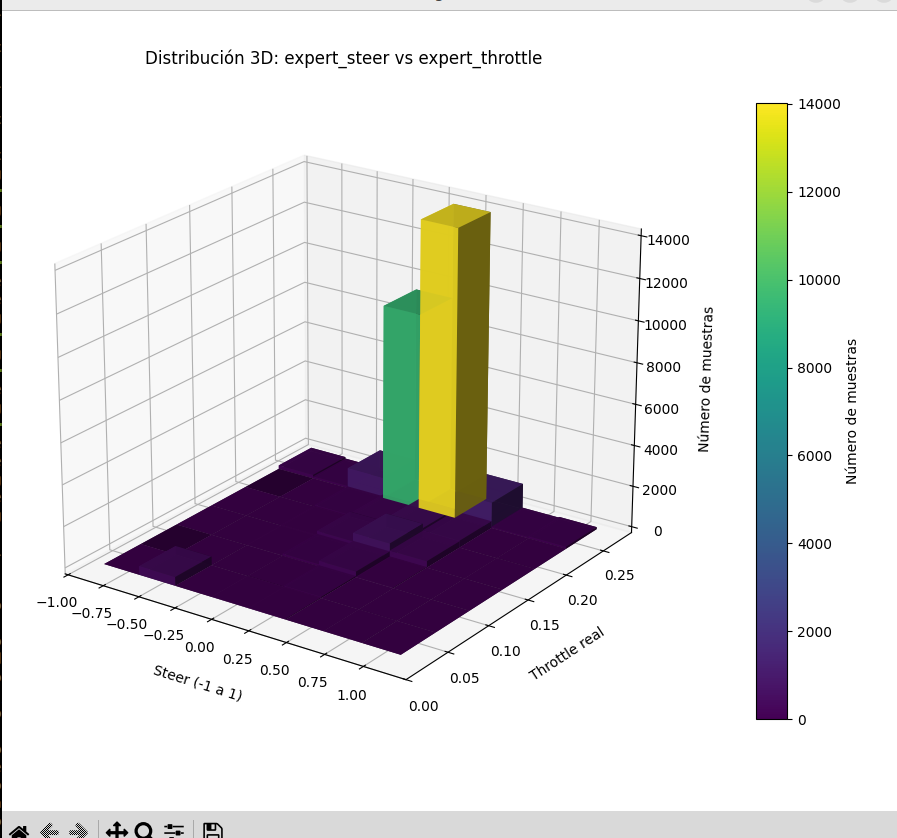
reducción agresiva de rectas ( steer pequeño), -
Preservación de curvas ( steer medio/alto), - Se aumento el numero de muestras para el balanceo (por ejemplo 35k desde 47k).
-
- Este balanceo se integró como paso previo al entrenamiento para forzar una política con mejor capacidad de corrección en escenarios donde el vehículo se desvía del centro del carril.
Entrenamiento y evaluación (resumen)
- Se continuó el flujo de entrenamiento supervisado para lane-following con MobileNetV2 (regresión de controles) sobre datos DAgger, con activaciones para respetar rangos físicos y una pérdida enfocada en steer.
- Se mantuvo el objetivo de validación en closed-loop: estabilidad y capacidad de recuperación, más que desempeño en rectas.
Visualizaciones