Soy ingeniero en robótica, apasionado por los vehículos autónomos y el desarrollo de tecnologías inteligentes que impacten positivamente el mundo real.
Week 36 – Propuesta Real-to-Sim, Arquitectura de Hardware y Pipeline de Datos
Trabajo realizado
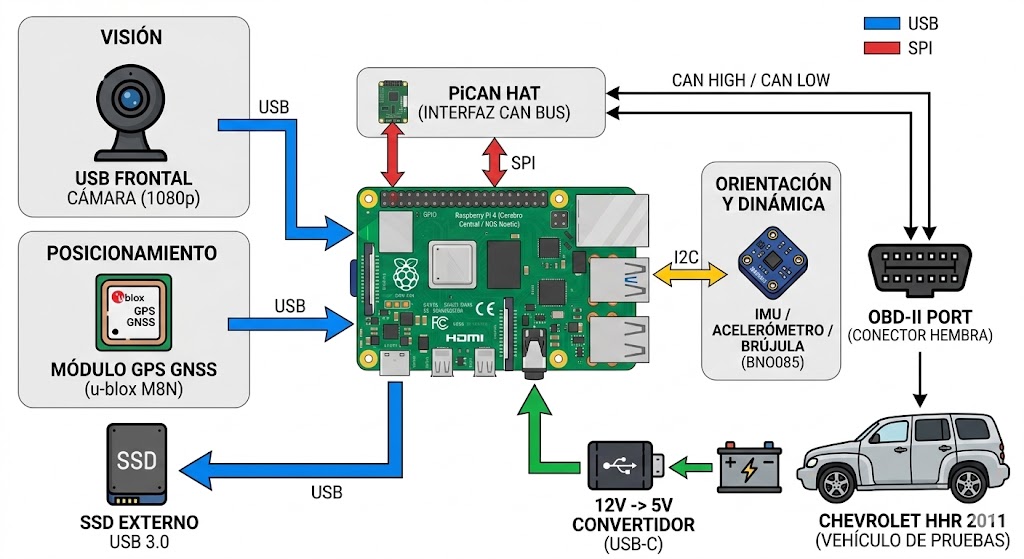
Propuesta de Arquitectura de Hardware: Se diseñó la topología del sistema para la recolección de un dataset físico (en un Chevrolet HHR 2011). El setup centraliza la captura de visión (cámara USB), telemetría (PiCAN HAT para CAN Bus), posicionamiento (GPS) y dinámica (IMU) mediante una Raspberry Pi 4 ejecutando ROS Noetic, garantizando así la sincronización exacta de las marcas de tiempo (timestamps).
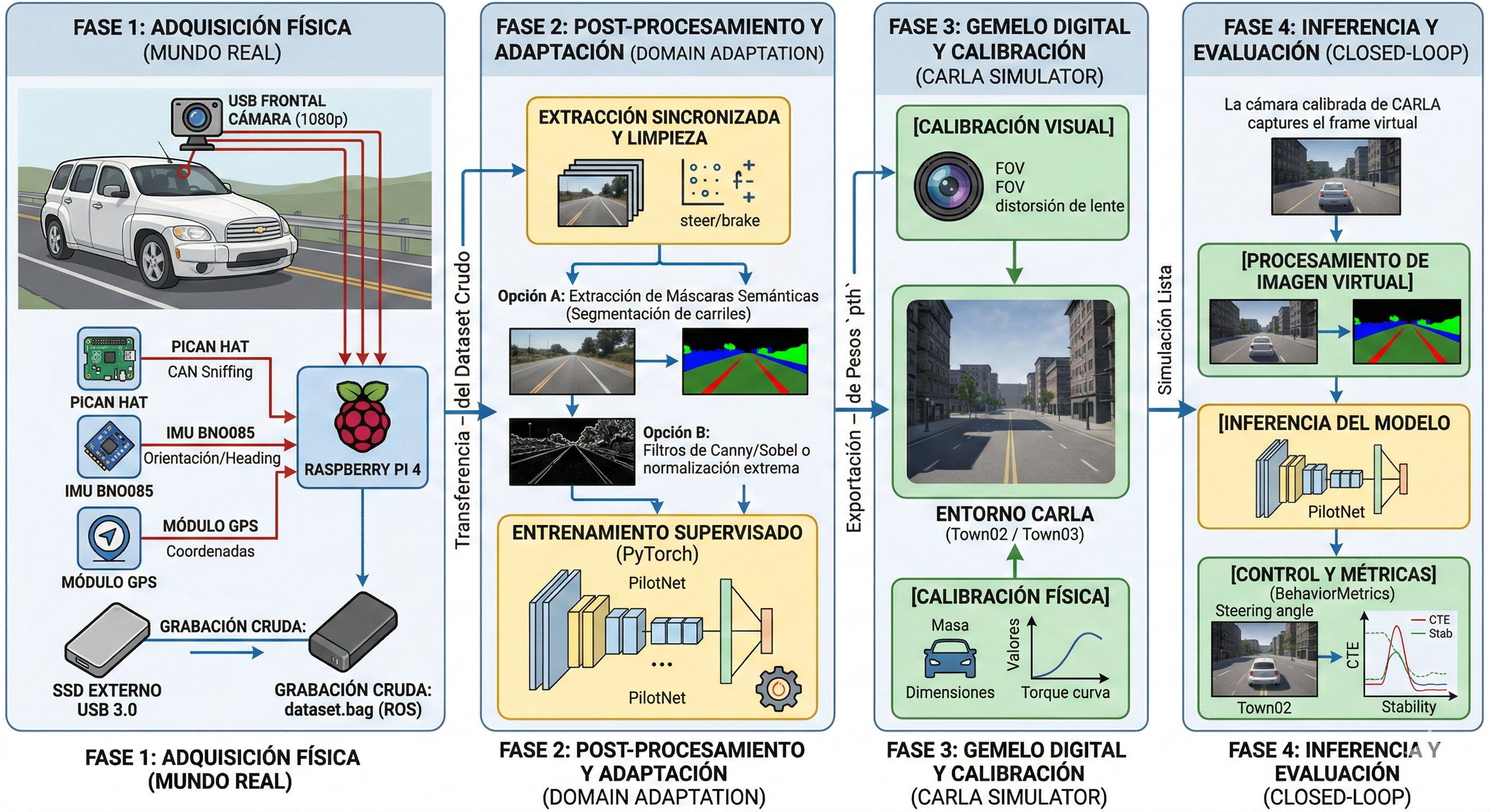
Diseño del Pipeline Real-to-Sim: Se estructuró teóricamente el flujo de trabajo en cuatro fases clave (Adquisición Física, Post-procesamiento/Domain Adaptation, Gemelo Digital en CARLA, e Inferencia Closed-Loop) para trazar la ruta de mitigación del domain gap al transferir el modelo del mundo real al simulador.
Consultas de optimización: Se envió un mensaje a Felix para revisar detalles técnicos sobre los scripts de suavizado; actualmente a la espera de sus comentarios.
Limitaciones de la semana: Debido a un viaje de trabajo a El Paso, la disponibilidad fue limitada. Por este motivo, quedó en pausa la tarea de optimizar el control del vehículo para mantener una velocidad crucero estable y superior (40 km/h) durante la inferencia.
Visualizaciones
Diagrama del sistema de adquisición de datos centralizado en Raspberry Pi para el vehículo físico.
Flujo de trabajo en 4 fases diseñado para cerrar la brecha de dominio (Domain Gap) entre las grabaciones reales y el entorno virtual.