Despliegue en servidor VNC y noVNC, y creación de primeros proyectos O3DE
Despliegue en servidor VNC y noVNC
Para inicios de esta semana necesitaba completar dos nuevas tareas:
- Desplegar o3de desde un contenedor docker usando la imagen de jdeRobot/robotics-backend:latest y mostrarlo mediante un servidor VNC: La semana anterior tuve problemas con el despliegue y no se completó esta tarea.
- Desplegar o3de desde un contenedor docker usando la imagen de jdeRobot/robotics-backend:latest y mostrarlo mediante noVNC: Una vez conseguida la anterior tarea, iniciar servicio noVNC y poder acceder al servidor VNC mediante un navegador.
Para esta semana pregunte a compañeros de prácticas para poder desatascarme. El problema del fallo del despliegue es que no estaba inciando un xserver, estaba fallando pensando que seria muy parecido a desplegar en un contenedor docker con x11 simplemente, pero para poder gestionar el servidor VNC necesitaba tener en cuenta un xsever como Xorg.
Una vez ya iniciado el servidor dentro de la imagen, ahora tenía que iniciar el servidor VNC(no hacía falta instalar ninguno porque ya estaba instalado en la imagen). Para ver como iniciar el servidor VNC me apoye de la ayuda de mis compañeros y en RoboticsApplicationManager, que es el que se encargar de arrancar todo cuando ejecutar un contenedor.
En el manager, hay una carpeta llamada vnc, donde se encuentra un código python que se encarga de iniciar un servidor TurboVNC.
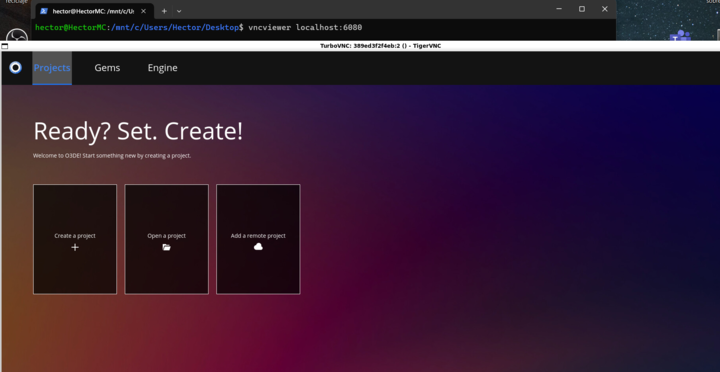
Una vez ya iniciado el servidor con su puerto y display, solo quedaba exportar un display al servidor VNC, ejecutar O3DE y comprobar que cargaba la interfaz gráfica en el servidor VNC, mediante un cliente VNC como TigerVNC.
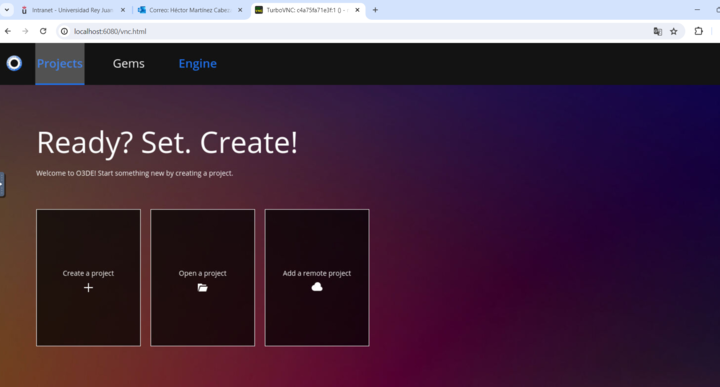
Después de lograr ya la conexión del servidor VNC, para conseguir que funcione el servicio noVNC fue tan simple como seguir leyendo los pasos que había en el código python, que además de explicar cómo iniciar el servidor VNC, también explicaba como hacer que funcione el servicio noVNC, simplemente teniendo en cuenta un puerto externo con localhost y uno interno con el servidor VNC.
Igualmente, con estas tareas tuve algunos pequeños problemas de puerto, debido a que al ejecutar el contenedor, no estaba exponiendo ningún puerto a localhost, pero fue un error fácilmente corregible.
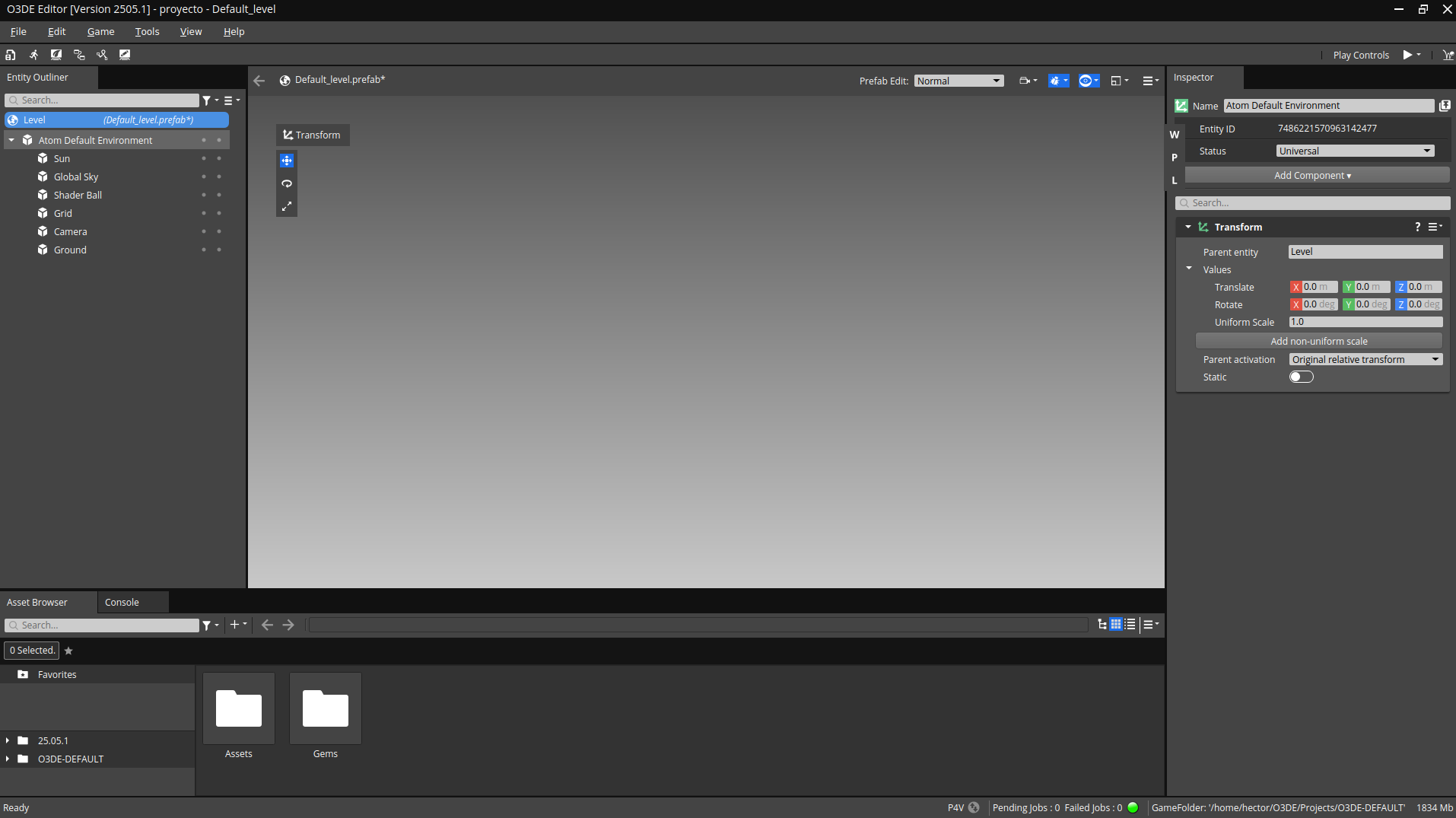
Creación de primeros proyectos O3DE
Una vez logrados ambos despliegues tuve que centrarme más ahora en la creación de proyectos con O3DE y ROS y analizar la configuración de los mismos. Esta tarea no la he podido completar esta semana a causa de varios fallos en la creación de los proyectos, así que me tuve que centrar primero en solo crear proyectos simples como MINIMAL y DEFAULT en O3DE. Aun así, he llegado a tener varios fallos como problemas con AssertsProcessor. Al final en la semana logré cargar el editor de los proyectos, pero no cargan los levels, seguramente debido a que no tengo la aceleración de GPU activada en WSL2, lo que provoca fallos en el render del escenario.