Análisis de rendimiento O3DE y Gazebo Harmonic,avance en ejercicio followline en O3DE y problemas implementación de ejercicio O3DE en Robotics Academy
Análisis de rendimiento O3DE y Gazebo Harmonic
Durante esta semana he estado con varias tareas a realizar de la semana pasada, una de ellas era realizar un análisis de rendimiento de O3DE y Gazebo Harmonic usando como ejercicio base laser mapping.
Después de poder crear crear ya los dos docker necesarios(un RADI para O3DE y otro para poder usar Gazebo Harmonic con GPU), pude analizar ambos entornos y llegar a las siguientes conclusiones:

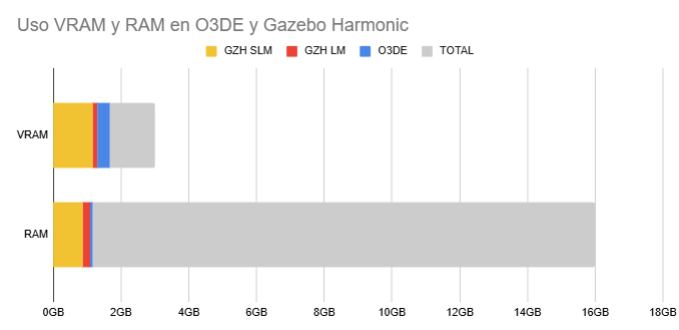
En estos gráficos podemos ver que entre la comparación del mismo ejercicio en 3 mundos distintos(en Gazebo Harmonic había 2 así que decidí comparar los 2), el que consume mayor GPU con diferencia es O3DE con diferencia, además de ser el que ocupa más RAM y VRAM.
Avance en ejercicio followline en O3DE
En cuanto al ejercicio de followline el problema principal para realizarlo es la carga de textura o material en O3DE, ya que los mundos que ya tenía disponible en Robotics Academy no cargaban correctamente en O3DE y solo cargaba el modelo.
He estado haciendo varias pruebas del problema y el principal problema era que había partes sin color base y sin mapa UV’s(un mapa 2D del modelo 3D). También gracias a la documentación de O3DE sobre formatos de escenas y un video de como subir modelos 3D de Blender a O3DE he descubierto que por ahora solo esta disponible formato .fbx y .stl, y que la disponibilidad de poder permitir formatos .glTF esta en desarrollo.
Gracias a estos avances, he podido lograr cargar el material en el modelo dentro de O3DE, pero aun sigue sin funcionar la textura. He descubierto también que existe Material Editor de O3DE para el tema de materiales y texturas, pero que mi ordenador no soporta y no llega ni abrir el programa, así que debo buscar otra manera de importar las texturas.
Problemas implementación de ejercicio O3DE en Robotics Academy
En la implementación de ejercicio de réplica de laser mapping(DemoLevel warehouse), me he estado guiando con la ayuda de mis compañeros de empresa y he copiado el level dentro del contenedor activo docker(develop_container) con docker cp y creado un mundo que apunte al .spawnable del level. El mundo se crea, pero el problema está al crear o modificar un universo, donde sale el siguiente error:
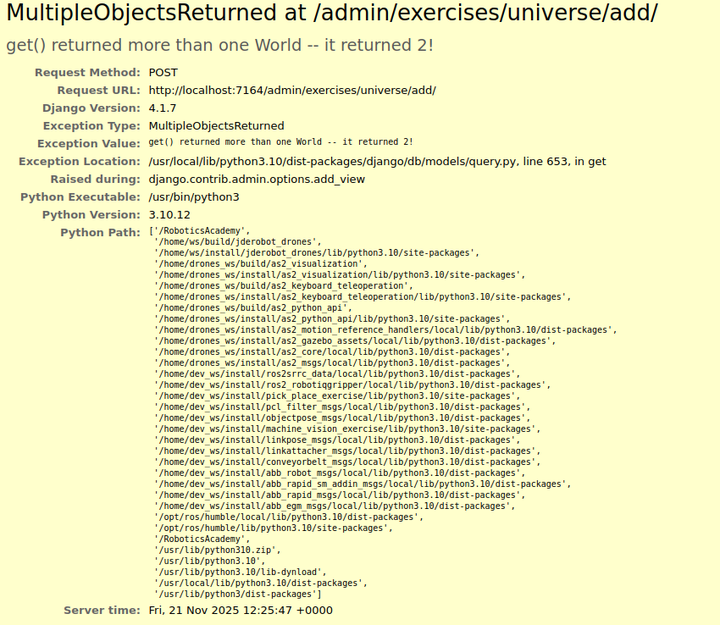
Quejándose que se devuelven varios mundos, durante la semana he probado distintas cosas como cambiar la manera de iniciar el docker pero sigue saliendo el mismo error.