Creación de mapa y avance robot en FollowLine en O3DE e implementación de ejercicio O3DE en Robotics Academy Laser Mapping
Creación de mapa y avance robot en FollowLine en O3DE
Esta semana he estado completando las tareas faltantes de la semana pasada, una de ellas era crear el ejercicio de FollowLine en O3DE.
La semana pasada logré cargar el modelo del mapa del circuito, pero no cargaba la textura.
Esta semana he logrado por fin cargar las texturas del modelo, para conseguirlo tuve que escribir el .material a mano el JSON, ayudandome de la documentación necesaria sobre materiales y texturas en O3DE para hacerlo correctamente.
Ahora tenía otros tres problemas:
- Generar colisiones del mapa: El mapa necesito que tenga colisiones en las paredes y el suelo del circuito para el coche.
- Importar robot de RoboticsInfrastructure: Necesito poder importar el robot ya creado para poder aportar portabilidad a los proyectos de O3DE para implementar los ejercicios de Robotics Academy
Para el tema de colisión del mapa, use PhysX Mesh Collider para el suelo y white boxes para las paredes logrando ya que tuviera colisiones.
En cuanto a la importación del robot, me estuve informando en la documentación oficial de importación de robots en O3DE y comprobe que en mi caso solo teniamos el .urdf y .sdf disponibles para importar, probe con el .urdf pero daba problemas, pero al final el .sdf funciono correctamente generando el robot
Igualmente, importar el robot no fue el fin, ya que necesito que funcione como Ackerman, para ello vi información sobre ackerman en O3DE y tuve que modificar cosas del robot y también desactivar componentes del mismo que genero en la importación, ya que no funciona correctamente ackerman con esos componentes.
Por ahora solo he logrado que se mueva un poco, pero aun tengo dos problemás que no he podido arreglar esta semana:
- Movimiento motriz de las ruedas de delante: El coche se mueve en linea recta, pero no gira correctamente.
- Fuerza motores en O3DE: Solo se mueve si el coche pesa 1 kg.
Este es la imagen del proyecto por ahora con las texturas cargadas y robot importado:
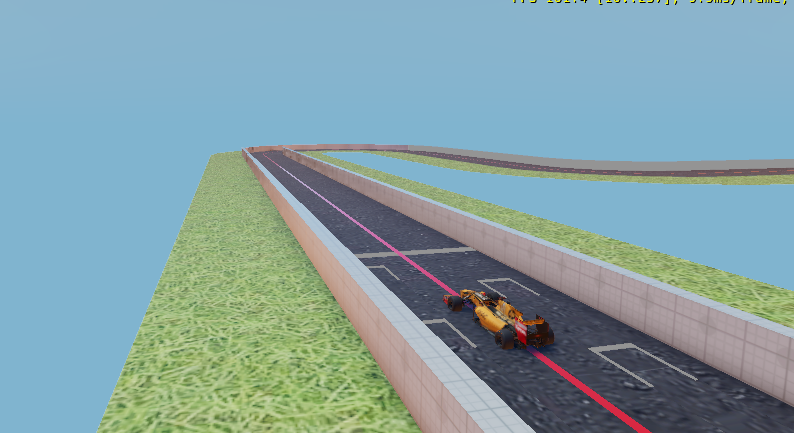
También para poder copiar el ambiente del ejercicio tuve que modificar todo lo que es los componentes del cielo y luces para poder dejarlo lo más parecido posible al del ejercicio.
Implementación de ejercicio O3DE en Robotics Academy
También esta semana estuve bastante atascado en esta parte ya que no entendía por qué el error no actualizaba la id y cómo podría subir mundos en RBX(robotics-backend especial para O3DE).
Al final, gracias a compañeros de empresa en donde hago las prácticas me di cuenta que el error ocurría a causa de problemas relacionados con PostgresSQL que no funcionaba correctamente desde /admin de django y que la única manera de añadir mundos, universos o ejercicios es modificando la base de datos.
En mi caso ya tenía creado en rbx dos ejercicios con un universo con un mundo respectivamente(Laser mapping y FollowLine), por lo que solo modifique la ruta del level del mundo de cada uno para poder comprobar que todo funciona correctamente y ahorrarme tiempo.
De esta manera, pude completar de replicar el ejercicio de LaserMapping en O3DE.