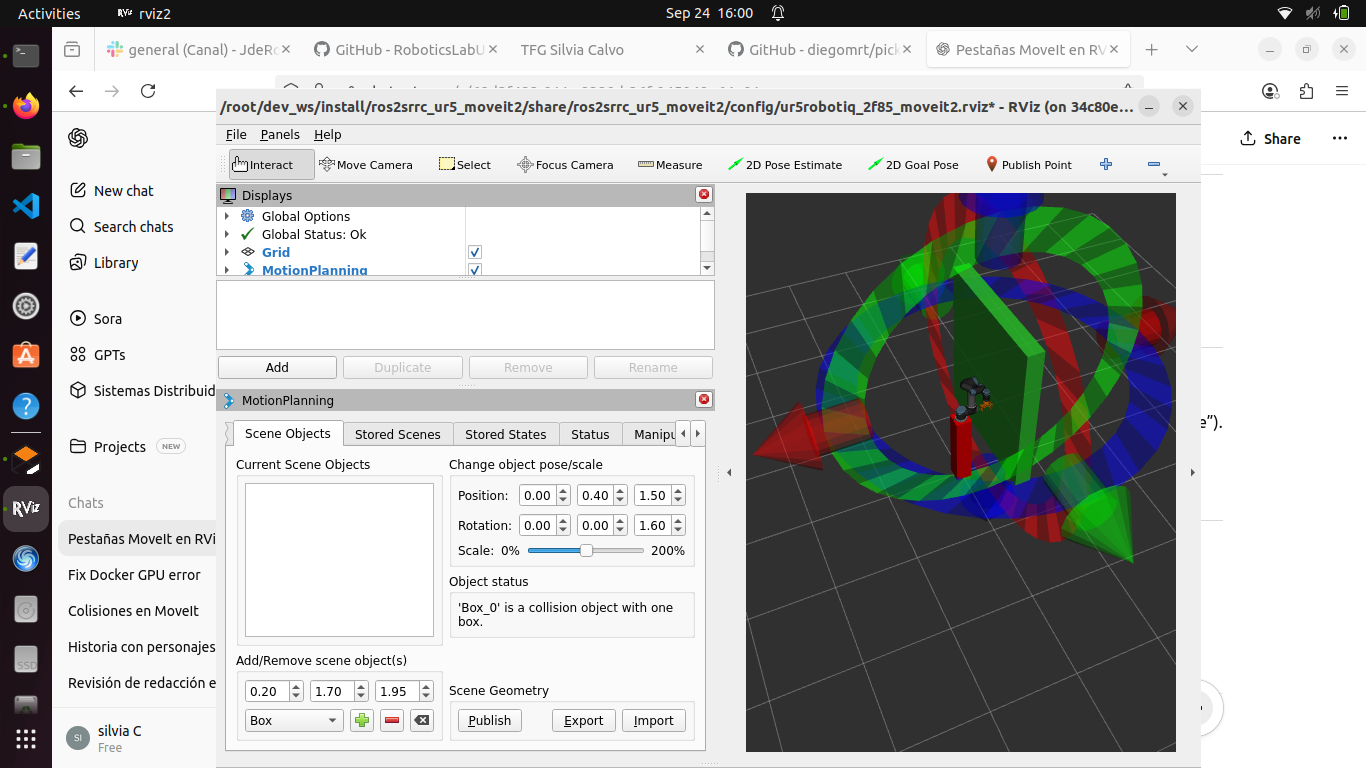
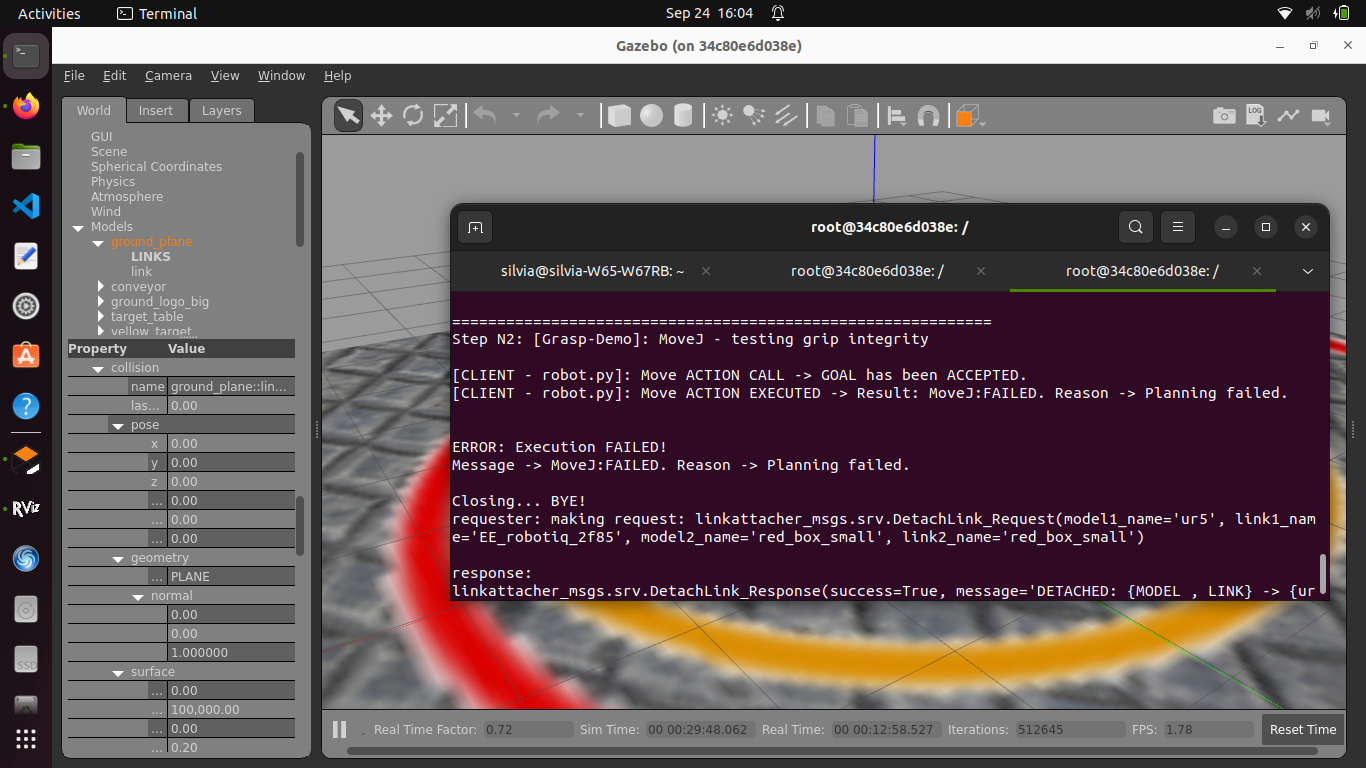
Open RViz and go to the Scene Objects tab in the Motion Planning panel. I added a wall to the left side of the arm (as shown below). This way, when running the simulation, the system will accept the goal of the movement, but during planning it will report failure, since the arm cannot reach the other side without colliding with the wall (as seen below).